����w�����ßoˢֱ��늄�(d��ng)�C(j��)�oλ�Â���������
ժҪ��
�C���˟oˢֱ��늙C(j��)���ں����I(l��ng)��ğoλ�Â��������Ʒ�����Ԕ��(x��)��B�����x�ġ��ͳɱ��ğoλ�Â������oˢֱ��늙C(j��)���������аl(f��)���y(c��)ԇ�Y(ji��)�����u(p��ng)����늙C(j��)���Ʋ��Ùz�y(c��)��늄�(d��ng)��(sh��)�ķ����������������D(zhu��n)��λ�û��ٶȂ��������������늙C(j��)�Ŀɿ��ԡ����e(cu��)�ԡ������ܶȼ����ܣ�����asic�����ü����·���M(j��n)�п��ơ�
�P(gu��n)�I�~���o�������oˢֱ��늙C(j��)����늄�(d��ng)��(sh��)�������ܶ�
1 ����
�oˢֱ��늙C(j��)�Y(ji��)��(g��u)��(ji��n)�Ρ��\(y��n)�пɿ����߹����ܶȵ����c(di��n)ʹ֮���m���ڌ�(sh��)�H���w�п����\(y��n)��(d��ng)��Һ����ȼ�ϱú��S��������(sh��)�õĈ�(ch��ng)�ϡ������Ҫ���ǣ��F(xi��n)���ԁ����S�����������O(sh��)�����Һ������(d��ng)���≺�b�õİl(f��)չ���������о����_�l(f��)�������е�����w������������M(j��n)늙C(j��)���������о��ϡ�
�oˢֱ��늙C(j��)�(q��)��(d��ng)һ����Ҫ��������z�y(c��)�D(zhu��n)��λ�á�λ�Â�������ʹ�Õ�(hu��)����һ���ijɱ��������(q��)��(d��ng)ϵ�y(t��ng)�Ŀɿ��ԡ���Փ�ϣ������ķN�������ԙz�y(c��)�oˢֱ��늙C(j��)�Ŀ��ƣ�
1��늙C(j��)�ķ�늄�(d��ng)��(sh��)
2�����ӵ������C������
3 �m(x��)�����O�ܵČ�(d��o)��g���c�_�P(gu��n)�Դ�b�÷���(li��n)�B��
4����늉����������늙C(j��)����
�@��(g��)�(xi��ng)Ŀʼ��2001�꣬�ܶ˾��(du��)�@���аl(f��)����֧�ֲ��ṩ��ٝ����(j��ng)�M(f��i)�����ßoλ�Â������oˢֱ��늙C(j��)���ʷ��������ڹ��I(y��)�����әC(j��)��(y��ng)���У�����fairchild��˾asic�����ü����·��оƬml4425���g(sh��)���˴��(xi��ng)Ŀ�о��Ŀ��Y(ji��)�����������eԔ��(x��)�f���˷��R���oˢ늙C(j��)�Ŀ��d�͝M�d����(d��ng)����(w��n)�B(t��i)�\(y��n)�е��^�̡�����asic�ğoλ�Â������oˢֱ��늙C(j��)�Ŀ����������ѽ�(j��ng)��(bi��o)��(zh��n)����ͨ�^�����O(sh��)Ӌ(j��)���ʅ^(q��)�������ڸ����ʵ��b���С�
2 �oλ�Â������D(zhu��n)��λ�ù���
�����fairchjld��˾��������һ��(g��)cotsasicоƬml4425���g(sh��)���Ķ���oˢֱ��늙C(j��)�ṩ��һ��(g��)��оƬ�oλ�Â������ٶȿ��Ƶ��·������@�Nasic�����ü����·���ļ��g(sh��)��һ��(g��)��늄�(d��ng)��(sh��)����λ�Â���������оƬvc0��������ʎ������һ��(g��)߉���аl(f��)������һ��(g��)�i��h(hu��n)�M�ɣ��Ķ��O��غ�(ji��n)���˟oˢֱ��늙C(j��)�Ŀ��ơ�asic߀�ṩ��һ��(g��)оƬ�l���Դ���ϙz�y(c��)������(du��)�ڵ���80����ֱ������늉����ԣ���������ֱ���(q��)��(d��ng)�ⲿp��n�ϵ���mosfet������������댧(d��o)�w��(ch��ng)Ч��(y��ng)���w�ܣ������к㶨�P(gu��n)���r(sh��)�g��pwm���ƭh(hu��n)�Ƀ�(n��i)�÷Ŵ������ƣ��Ķ�����늙C(j��)�Ĺ�������� ml4425���D(zhu��n)��λ�ù����Ǹ���(j��)늙C(j��)�෴늄�(d��ng)��(sh��)�z�y(c��)�M(j��n)�еġ���һ��(g��)�oˢֱ��늙C(j��)�\(y��n)�е��^���У�����(g��)����ֻ�Ѓ���������˲�r(sh��)����(l��)�ţ�ԔҊ�D1��
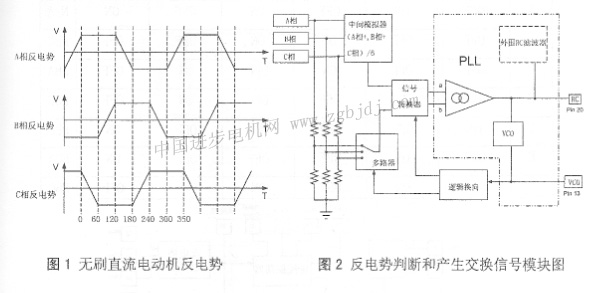 ��늄�(d��ng)��(sh��)��̖(h��o)����ͨ�^δ����(l��)���@�M�@�ã���늄�(d��ng)��(sh��)����λ��ȡ�Q���D(zhu��n)��λ�á�����D(zhu��n)��λ�ÿ���ͨ�^�z�y(c��)���c��늄�(d��ng)��(sh��)���^���c(di��n)�g�ӫ@�ã��@�ӣ����ԫ@����λ�Q�������̖(h��o)����늄�(d��ng)��(sh��)�z�y(c��)������ml4425оƬ����D2��ʾ������늉���̖(h��o)ͨ�^��·���c������ģ�M���a(ch��n)����늄�(sh��)����^���ṩһ��(g��)׃�Q��̖(h��o)��
��·���c��̖(h��o)׃�Q��һ���ɓQ��߉��Ԫ���ƣ��Ķ��_�������@�M����(l��)�����зŴ����a(ch��n)������(y��ng)����늉�����̖(h��o)׃�Q�����Ŵ�������ͨ�V������������оƬ�ϣ���늉����l�ʉ�����ʎ�����Q��߉��Ԫ�a(ch��n)����D2��ʾ���i��h(hu��n)pll����D��
�����������У���ͨ�V�����еķŴ���ݔ��һ��(g��)ƽ��(w��n)��ֱ��늉���vc0������ʎ���ϣ��@�Ӿͮa(ch��n)����һ��(g��)����(y��ng)���D(zhu��n)��λ�õēQ��߉�z�y(c��)��̖(h��o)������D(zhu��n)���ٶ�����ijЩԭ����pС�����ӣ�vc0��ݔ��늉�����(hu��)�ڜy(c��)���ķ�늄�(d��ng)��(sh��)�͓Q�������̖(h��o)�У�������λ�ǵ��Ƅ�(d��ng)׃�����l(f��)����׃��vc0�a(ch��n)���ēQ�������̖(h��o)�l�ʌ���(hu��)�õ�����(y��ng)���{(di��o)������ˣ��]�h(hu��n)λ�õĿ�����pll�i��h(hu��n)·��(sh��)�F(xi��n)��ml4425 asic�Y(ji��)��(g��u)�IJ���ԭ��Ȧ��D3��ʾ�����Ը���(j��)�oˢֱ��늙C(j��)��ϵ�y(t��ng)����(sh��)�x������·��
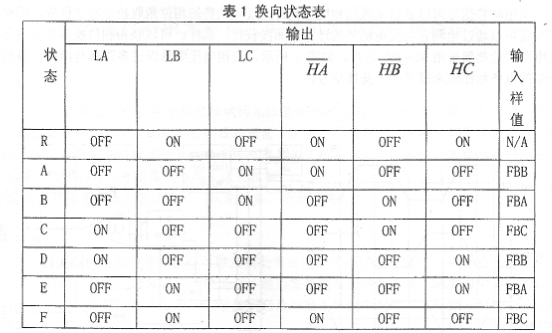
��(d��ng)늙C(j��)��ֹͣ������\(y��n)ݠ�r(sh��)��pll��o���Б�(y��ng)��늄�(d��ng)��(sh��)��̖(h��o)��ֹͣ����������늙C(j��)������_�h(hu��n)���ƕr(sh��)����(d��ng)��������늙C(j��)����(d��ng)�r(sh��)���D(zhu��n)�ӱ����һ��(g��)�A(y��)����λ�á�оƬ����ͨ�Դ�r(sh��)��ml4425�����O(sh��)��һ��(g��)����Ķ�λģʽ����λģʽ�_����ݔ���(q��)��(d��ng)��lb��ha��hc���������ڵ�һ�ΓQ���B(t��i)�����Č�늙C(j��)��λ��30��늽Ƕȡ�Ԕ��Ҋ�Q���B(t��i)��1�е�r��B(t��i)����λģʽ�ĕr(sh��)�g��һ��(g��)�B����cm���_�ϵ�������O(sh��)�á��xȡ�m��(d��ng)?sh��)�c��ֵ���Դ_��늙C(j��)����ؓ(f��)�d�_ʼ��rλ�ã����l��ʾ��
|