���şoˢƴ�K늙C���D�ؼy����С��
ժҪ��
����ӑՓ�����ࡢ���ࡢ����ƴ�K늙C���m���ԣ����ڎ����ŷ����������ݲ�đ��������P�I��Ҫ���о��������������\�Зl���£��X���x���m���IJ۔��͘O���M�ϣ���ʹ늙C������ܶ���С�����ԫ@�ØO�õ��ŷ����ԡ�Ҫʹ�D�ؼy����С���w������Щ�X�ۺ��N���ϗl��������������һ�N���������D�ؿ��Ʋ��ԡ�
����늙C�\���ں��D�غͺ㹦��ģʽ����Ҏ����늉�����£�ʹ�~�p��̎����С�����ú��m�Ŀ��Ʋ����܌��F�o�y�����D���\�С�����һ������늙C�����ݲ���ϵ�y��Ӌ��C�����f����ԓ����ģʽ�đ��á�
�P�I�~�������ݲƴ�K늙C��������ƣ�����늙C���ŷ���
1 ����
���şoˢ�ŷ�늙CԽ��Խ�õ��V���đ��ã��w������߹����ܶȡ���Ч���Լ��c����늙C�Ӽ��g����и��õĄӑB���ܡ�Ȼ����Ŀǰ���şoˢ늙C�ļy���D�ؽ����Ǒ����е���Ҫ���}���������ٶȺ�λ�ÿ��Ƶđ����С����˜pС늄ӄ��еĽ��^�D�غ��C�������y�������şoˢ�ŷ�늙C���OӋ�м��Կ��]����ֲ��@�M�Ͷ����D��б�ۣ����Y������������ɱ��͜p��Ч�ʺ����ܶȡ����ҳ������Ы@�úõ��ŷ�����֮�⣬���y�oˢ����늙C�����ݲ�ĶȔ�Ҳ����Ҫ�ģ��Ҳ����M��ɿ���Ҫ��
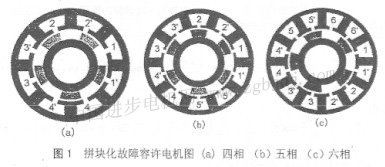
���şoˢƴ�K늙C���Єe�ڂ��y�oˢ늙C��D1��ʾ��ֻ��������@�ƾ�Ȧ��׃�����X�ۣ�ԓ�@�M�����ɱ������������ߣ����磬��늄���܇�Ј���������ƴ�K늙C�OӋ�����ҿ��Â��y������׃���ӡ���������ÿ���@�M֮�g�����ǽ^���ģ�����������������Ĺ����ݲ�@�ø��ߡ�
���⣬����һ���o���������������Ӳ۔����D�ӘO�����^��Ŀ�ĽM���Ǵ��ڵġ����ā��f���ٶ�ijƴ�K�͙C��һ�����������ķ�늄ݲ��Σ���ô�������������Ҫ����һ�N���������̖���ܽo�����m����Ҫ����D�ء�Ȼ���������늄ݵIJ��β������Ҳ��������T���·�_·���·�����ڹ��ϗl���µĴ������}�ӣ��@�N��һ�Ŀ��Ʋ��Բ��ɱ����Ҫ��늙C�������\�Зl���®a���D�ؼy�����@�ɂ����}����ͨ�^���������D�ؿ��Ʋ��Զ������ֿ˷��������Ԝp���~�p��Ŀ�˶�ጷ��D��Ҫ��ġ���ǰ���Ʋ��Ե�Ч�ʱ���׃��늉�����ֹ�ˡ���������С���~�p���Y��Ҫ���@�M���څ���ڷ�늄ݡ��Y�����ڸ��ٿ�������늙CҪ����D�ٚw������׃��늉����ޡ�
�S�లȫ�R�瑪��Ҫ������ݲ����\���ڌ��ٷ������������D���\��ģʽ�ͺ㹦���\��ģʽ��Ȼ����Փ��һ�������ݲ�oˢ늙Cÿ��Ԫ�Б����\���ڟo�ތ����B�m�Դ����֮�ȣ�Ŀǰ�Ŀ��Ʒ�ʽ��������������ϗl�����\�Еr�ṩ��Ч��ʽ���Y����ƴ�K늙C�ĝ��ڹ�������ֻ���ׅf��
����ӑՓ�����ࡢ���ࡢ����ƴ�K늙C���m���ԣ������Ǒ����ڵ��ŷ����Ժ����ݲ�Ķ����P�IҪ��ĵط�����һ�����y�������������������@ʾ�������ں��m�IJ۔��͘O���M�ϣ������õ��\�Зl����늙C�����ܶȵ�Ӱ���С���O�õ��ŷ����Ԍ����õ���Ȼ��������һ���·���_·���ϣ����a���D�ؼy��������߀�����������D�ؿ���ģʽ�m�����B�mݠ�غ��B�m�Դ���\�з��������������ϵėl���®a���y���D�ء�
2��늄��C��ʧ����X���D��
2.1��늄��C��
���ڟoˢ�����ŷ�늙C��ͨ��������������Σ���늄ݵ��C��ʧ����X����ݔ���D�ؼy���ăɴ���Ҫԭ���S�༼�g�����@�M�ֲ����D�ӡ�����б�����m�õģ����˫@�����ҷ�늄ݲ��κ͜p���X�ۡ�
��һ��������m��늙C��늴��D�����£�
����n= km��1
��ˣ�늄ӄ��C������n�w�Y�����ؼy���Įa����ֻ�Ю�(n��1)=k0�r��k���������@�ӣ��ɷ�늄��C��������������������Ӱ푶��a�����D�ؼy��������ʾ��
��n=5��7��ll��13��l7��19��23- ��һ�_����늙C
��n=3��5��7��9��ll��i3��15��17��19��2l������һ�_����늙C
��n=9��11��19��21--�� ��һ�_����늙C
��n=5��7��ii��13��l7��l9��23- ��һ�_����늙C
|