����Ӌ(j��)��C(j��)������ͬ��늄�(d��ng)�C(j��)�����\(y��n)�D(zhu��n)����(sh��)�Ĵ_��
ժҪ��
�ڸ����\(y��n)�D(zhu��n)������(n��i)�ğoˢ����ͬ��늙C(j��)�����ԣ����Ì�(sh��)�(y��n)�������_���ġ��Y(ji��)����������Ӌ(j��)��C(j��)�M(j��n)�Ѕ���(sh��)�Єe��������Փ�͌�(sh��)�y(c��)�����(q��)��(d��ng)���õ�3hp��****�D(zhu��n)��8000r/min�ă�(n��i)������ͬ��늙C(j��)���D(zhu��n)�ؽǹ��ܰl(f��)�������@��׃�����ň�(ch��ng)�Ǿ�������ͨ�^늙C(j��)ģ���ڌ�����������(n��i)����Ӌ(j��)�㡣
�P(gu��n)�I�~������(sh��)�_�������şoˢͬ��늙C(j��)�� �ň�(ch��ng)�����������\(y��n)�D(zhu��n)��ʸ������
1����(ji��n)��
���ҷ�늄�(sh��)���şoˢͬ��늙C(j��)�c���M(j��n)����ӿ������M�����ڏV���Ĺ��I(y��)��(y��ng)���аl(f��)�]���郞(y��u)�������ܡ�����ͬ��늙C(j��)��ͬ�����D(zhu��n)����ϵ��(n��i)����ʸ�����ƣ��(q��)��(d��ng)d�S늘��������ؓ(f��)�d���ٶȵĺ���(sh��)�M(j��n)��׃�����@�N������������ͨ�p�����������S늙C(j��)�\(y��n)���ڸ��ߵ��ٶȺ����ؼ�(j��)�e�¡��څ����īI(xi��n)��l��һ��4��������P(gu��n)�īI(xi��n)���܉��ҵ�ԓ�����ܿ�����Փ���䑪(y��ng)�á�ǡ��(d��ng)ʹ��ԓ�����M(j��n)�����ʸ�������܉�õ�һ�N늙C(j��)�c�(q��)��(d��ng)���ĽM�ϣ������и������D(zhu��n)�ء�Ч�ʺ͔U(ku��)չ���ٶȷ�����
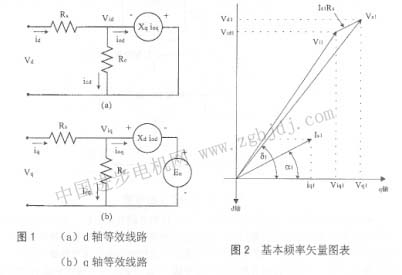
�ڞ�oˢ����ͬ��늙C(j��)�(q��)��(d��ng)�����O(sh��)Ӌ(j��)���ʸ���㷨�r(sh��)����Ҫ֪��늙C(j��)����(sh��)��****�����㷨��(sh��)�F(xi��n)����õ��ą���(sh��)����(ji��n)��ģ�ͅ���(sh��)���£�ld-ֱ�S늸У�lq -���S늸кͦ�mag-���Ŵ�朡��@Щ����(sh��)���Ծ��Դ_��d�S늿�xd.q��늿�xq�ʹň�(ch��ng)��(l��)��늉�e0���@Щ���Ի�����(sh��)����Ӌ(j��)����Ʒ��t�����磺늉����ƙE�A��ÿ����****�D(zhu��n)��܉�E��1����
����ͬ��늙C(j��)�D(zhu��n)��ͨ��������ǰ�ᵽ�ą���(sh��)�͘O��(du��)��(sh��)p�����_(d��)����ʽ(l)��ʾ���������D(zhu��n)�ؿ��Ƴ�ʹ��ʽ(1)�ڶ��(xi��ng)���o���Ĵ����D(zhu��n)�ء��@�N������Ҫ֪��ld��lq�ͦ�magֵ�����������õ����şoˢͬ��늙C(j��)�]���ṩ��ǰ�ᵽ�ą���(sh��)��������ֵ����ʹ�ṩ�˅���(sh��)��Ҳ�H�H��ʾһ��(g��)�����c(di��n)��ǰ�������ڵ�������ɣ�����@ʾ����(d��ng)늙C(j��)ؓ(f��)�d�r(sh��)���@Щ����(sh��)�@���طǾ���׃������ˣ���(d��ng)����늙C(j��)����(g��)�ٶ�ؓ(f��)�d�����r(sh��)��ģ�ͅ���(sh��)ld. lq�ͦ�mag�������̶�ֵ���@����(d��o)����ǰ�ᵽ����������㷨�e(cu��)�`��Ч��ʹ�á�
���ĵ��о��������ڸ����\(y��n)�з����´_�����şoˢͬ��늙C(j��)����(sh��)���ԵĽY(ji��)���������ڌ�(sh��)�(y��n)�y(c��)ԇ�b���в��������Ӌ(j��)��C(j��)�o���y(c��)�����g(sh��)���Á��(q��)��(d��ng)�������şoˢͬ��늙C(j��)��8000r/min���ϵ��ٶ��\(y��n)�D(zhu��n)����ȡ���@��(g��)��(sh��)�(y��n)ͨ�^�ڳ����V韹����c(di��n)����������Ӌ(j��)��늙C(j��)ģ�ͣ��f���˴ň�(ch��ng)�Ǿ��ԡ��@��(g��)ģ�����S��(du��)�������şoˢͬ��늙C(j��)�ڳ�������(g��)�����������M(j��n)�Џ�(f��)�(y��n)������
2 ģ�K�f��
���şoˢͬ���C(j��)��(g��u)����(sh��)����ͨ��ֻ�����Ƴ���(ji��n)�������������Ĺ������Q��Ԓ�f�����ڛ]�дň�(ch��ng)ͶȺͷǾ���Ӱ��µğo�p�Ĺ������@�ӵķ����ṩ�˳��^�����ٶȷ������ڱ��^�͵��ٶ��¹����Ŀɽ��ܵĽY(ji��)�����ڱ��^�ߵ��ٶȺͳ��^�˺ܴ���ٶȷ������F�ēp�ĺʹň�(ch��ng)�Ǿ��Ե�Ӱ푳ɞ���^��Ҫ�����ء�
�Ŝ��pʧ��s�c�l�ʳɱ������u�������s�c�l�ʵ�ƽ���ɱ�������(d��ng)늙C(j��)�ٶ����ӕr(sh��)�t�����ձ顣��ˣ��ڵ�Ч�·���F�ēp�IJ��ܱ����ԡ��Dl���������şoˢͬ���C(j��)��(g��u)�����\(y��n)�D(zhu��n)�r(sh��)d�S��q�S�ĵ�Ч�·���@��(g��)ģ�K�J(r��n)��ֻ�ܵ���������(l��)�l��Ӱ푣�����������żȻؓ(f��)�d�pʧ��Ӱ푣�����C(j��)��(g��u)��늄�(sh��)�C��ѭ�h(hu��n)�ň�(ch��ng)�ĸɔ_��ģ�K�����~�p�����迹r����ʾ���F�ēp�ġ��F�ēp�İ��������pʧ���c�C(j��)��(g��u)����늉���vi��[8][9]�ɱ����������@�ӵ�Ԓ���x�����rc����ˣ�ģ�K�����������ʸ���ɿ��Ƶēpʧ��
d�S��q�S��Ч�·��(sh��)�r(sh��)�y(c��)���܉����(j��)�C(j��)��(g��u)����ԭ����λ�D���_�����oˢ����ͬ���C(j��)��(g��u)�ڽӽ��~��ؓ(f��)�d������r��D2�����������/s���ǿ��S�ķ�֧����ˮa(ch��n)��1��(g��)d�S�������֧��ͨ�����\(y��n)��ģʽ���浽����ͨ�p�١�����(d��o)��ʽ(1)�д����D(zhu��n)�ط����ӵ���wmagiq�a(ch��n)���Ĉ�(ch��ng)�{(di��o)���D(zhu��n)�أ����ЈD2�е����ɻ��lԪ����(g��u)�ɵģ��������ڿɜy(c��)����ݔ������һ���y(c��)�ã��@Щ���d�S�Ϳ��S���M�����Ա��Á�Ӌ(j��)��Dl�е�Ч�·�ą���(sh��)Ӌ(j��)�㡣
3��(sh��)�r(sh��)ԇ�(y��n)�O(sh��)��
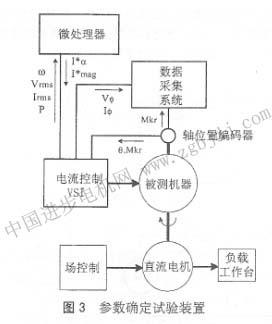
����Y(ji��)��(g��u)��7. 5kva���������늉�Դ��׃���(q��)��(d��ng)ϵ�y(t��ng)���Á��o���y(c��)늙C(j��)�ṩ���C������������Ñ��ӿڲ���̎�������������S�����ʸ���˹����ƻ��Ԅ�(d��ng)���ơ��D3չʾ���nj�(sh��)�(y��n)�b�õĻ���ģ�K�D��
���y(c��)늙C(j��)ͨ�^һ��(g��)�p��������ϵ�һ��(g��)���y(t��ng)����ˢֱ��늙C(j��)��ؓ(f��)�d�Ŀ�����ͨ�^����ֱ��늙C(j��)�ɞ�һ��(g��)��(d��)���ļ���(l��)������ |