�ŷ�늄�(d��ng)�C(j��)�C(j��)늕r(sh��)�g����(sh��)
�Ĝy(c��)ԇ����
ë��Ʒ Ī��(hu��)��(����늙C(j��)�о���)
1 �� ��
�C(j��)늕r(sh��)�g����(sh��)���ŷ�늄�(d��ng)�C(j��)��һ��(g��)��Ҫ����ָ��(bi��o)����Փ��������늚�r(sh��)�g����(sh��)�͙C(j��)е�r(sh��)�g����(sh��)���M�ɣ������Ǻ�(ji��n)�εľ��ԯB���P(gu��n)ϵ�����Ҫ�ęC(j��)늕r(sh��)�g����(sh��)�Ĝy(c��)��ֵ�У������߷��_�Ǻ����y�ġ��C(j��)늕r(sh��)�g����(sh��)�Ĝy(c��)ԇ�����ܶ࣬��늄�(sh��)�����͡�����������ձ���õķ�������(sh��)�`���������@�ɷN�����y(c��)�õĔ�(sh��)��(j��)������ȫһ�¡�ͨ�������P(gu��n)��(bi��o)��(zh��n)��a(ch��n)Ʒ���g(sh��)�l���ж�Ҏ(gu��)�����á�늄�(sh��)��������������y(c��)ԇ�r(sh��)�g����(sh��)�r(sh��)��늄�(d��ng)�C(j��)��(y��ng)̎�ڿ��d����(d��ng)�^(gu��)�̣�����(sh��)�Hʹ���У��Еr(sh��)��Ҫ��ij�Nؓ(f��)�d�y(c��)ԇ����Y(ji��)���֕�(hu��)������?߀�У���(sh��)�y(c��)������(d��ng)�^(gu��)�������Еr(sh��)���F(xi��n)��ʎ�F(xi��n)���@�N��ʎ�F(xi��n)������ʲô��r�°l(f��)�����˕r(sh��)��늄�(sh��)���͡���������ɷN�Y(ji��)������ʲô�P(gu��n)ϵ����ͨ�^(gu��)����(sh��)ֵӋ(j��)�㡱����ŷ�늄�(d��ng)�C(j��)�C(j��)늕r(sh��)�g����(sh��)�y(c��)ԇ�^(gu��)���е��ַ��̣����M(j��n)��ӑՓ��
2�y(c��)ԇ������ԭ��
���P(gu��n)��(bi��o)��(zh��n)��a(ch��n)Ʒ���g(sh��)�l��Ҏ(gu��)�����ŷ�늄�(d��ng)�C(j��)�C(j��)늕r(sh��)�g����(sh��)�y(c��)ԇ������늄�(sh��)�����������2��1늄�(sh��)��
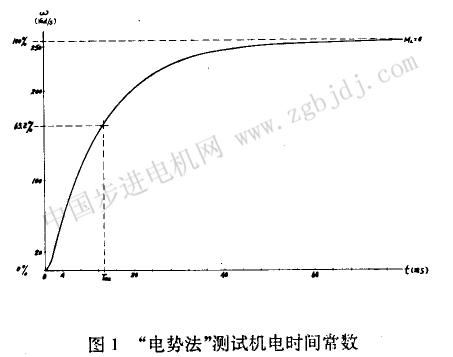
늄�(d��ng)�C(j��)ͬ�S���y(c��)�ٰl(f��)늙C(j��)���ɜy(c��)�ٰl(f��)늙C(j��)�����ӵ�ؓ(f��)�d��(y��ng)�M��С��ԇ�(y��n)�r(sh��)늄�(d��ng)�C(j��)���d���ȼ����~����(l��)��늉���Ȼ���~��늘�늉��A�Sʽ����늘Ѓɶˣ���ʾ�����zȡ�y(c��)�ٰl(f��)늙C(j��)늄�(sh��)�S�D(zhu��n)��׃���IJ��Σ��IJ��ΈD����ȡ��(du��)��(y��ng)늘��D(zhu��n)��?g��u)�����ٵ���(w��n)�����d�D(zhu��n)�ٵ�63��2����ĕr(sh��)�g������(du��)�y(c��)�ٰl(f��)늙C(j��)늘��D(zhu��n)��(d��ng)�T����Ӱ��M(j��n)�����������͵Ĝy(c��)ԇ������D1��ʾ��
2��2�����
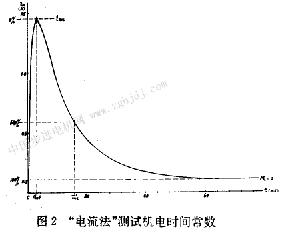
��늄�(d��ng)�C(j��)��늘л�·�д�����m�IJɘ����r(Ҳ�������̺��m��������(n��i)�����)���ɘ���茦(du��)늘л�·����Ӱ푑�(y��ng)�M��С��ԇ�(y��n)�r(sh��)늄�(d��ng)�C(j��)���d���ȼ����~����(l��)��늉���Ȼ���~��늘�늉��A�Sʽ���봮�вɘ�����늘л�·�ɶˣ���ʾ�����zȡ�ɘ����ɶ�늉���(������늘����)�S�D(zhu��n)��׃���IJ��Σ��IJ��ΈD����ȡ��(du��)��(y��ng)늘��D(zhu��n)��?g��u)�����ٵ���(w��n)�����d�D(zhu��n)�ٵ�63��2 ����ĕr(sh��)�g�����͵Ĝy(c��)ԇ������D2��ʾ��
늄�(sh��)���Ĝy(c��)ԇԭ���ǻ���e(l)=k��n(t)��ʽ��kr��y(c��)�ٙC(j��)�ķ�늄�(sh��)����(sh��)����������Ĝy(c��)ԇԭ���ǻ���  k��n(t)��ʽ��k e�鱻ԇ늄�(d��ng)�C(j��)�ķ�늄�(sh��)����(sh��)�� 3��(sh��)ֵӋ(j��)��
3��1��(sh��)�W(xu��)ģ��
�o(w��)Փ�ǡ�늄�(sh��)�����������������(d��ng)�����]�F�����r(sh��)���ڙC(j��)늕r(sh��)�g����(sh��)�Ĝy(c��)ԇ�^(gu��)���У�
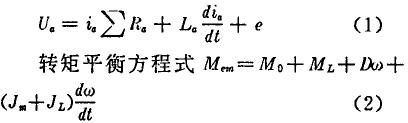
���M�����ɂ�(g��)���̣���늉�ƽ�ⷽ��ʽ
ʽ��uo����늘ж�늉�
ig����늘����
��ra����늘л�·�����
lg����늘�늸�
mo����늄�(d��ng)�C(j��)������
m1һؓ(f��)�d����
jm����늄�(d��ng)�C(j��)�D(zhu��n)��(d��ng)�T��
jr����ؓ(f��)�d�D(zhu��n)��(d��ng)�T��
d����늄�(d��ng)�C(j��)ճ������ϵ��(sh��)
�ء���늄�(d��ng)�C(j��)���D(zhu��n)���ٶ�
e����늄�(d��ng)�C(j��)���D(zhu��n)�r(sh��)�a(ch��n)���ķ�늄�(sh��)
mm����늄�(d��ng)�C(j��)�a(ch��n)����늴�����
�Dxxxxxx
ke��kt�քe��늄�(d��ng)�C(j��)�ķ�늄�(sh��)����(sh��)�����س���(sh��)����mks��λ����
��ʽ(3)��(1)��(5)����ʽ(i)��(2)���t��
ʽ(8)��������Ҫ�Ĕ�(sh��)�W(xu��)ģ�͡�
3��2Ӌ(j��)�㌍(sh��)��
����(j��)ʽ(8)��(sh��)�W(xu��)ģ�ͣ���rһk����(du��)ijֱ���ŷ�늄�(d��ng)�C(j��)������(d��ng)�^(gu��)���M(j��n)�Д�(sh��)ֵӋ(j��)�㡣
늙C(j��)����(sh��)
|