����ʽ���M늄әC�o�B�D�����ԵĔ�ֵ����
�u���� �� �r ���Ϻ����I��W��
��ժ Ҫ�����ô_��Ԫ��ֵ�ⷨ���W���Ԅ��ʷּ��g������ʽ���M늄әC�ڰ낀�X������M���˴ň��������քeӋ���˴���ʽ���M늄әC����ͨ늺��p��ͨ늕r���o�B�D���ԣ�Ӌ��Y���c���yֵ����ӽ����_���˹����OӋҪ��
���� �~�����M늄әC����늄әC�o�B�����D�����ޟo����ֵӋ�マ���OӋ
1 �� ��
���M늄әC���OӋ�̓����OӋ������Ҫ��������ָ�˵��A�y���������ڲ��M늄әC�ĽY�����\�Зl�����⣬�˂���Ӌ���^��������Ҫ��ijЩ���O��������Դ�·��ͻ��Ǽٶ��F�IJ��ֵĴʼn����c�D��λ�ßo�P�ȣ�����õ��������@��Ȼ���oӋ��Y������һ�����`����˳�ֿ��]늙C��·��͌������ܵ�Ӱ푣����Č��ԘәCbf36�ʹ���ʽ���M늄әC��������������Ԫ��ֵ�ⷨ���������W���Ԅ��ʷּ��g��������늙C�����^���M�дň����������늙C�ň��ĴŹ��ܣ��M��Ӌ���늙C���o�B�D�ء�����ʽ���M늄әC�Ķ����D���X�γߴ�IJ�ͬ����Ӱ�늙C��·�ĴŌ���늙C�ň����Ķ�Ӱ�늙C�����ܡ�
2�o�B�D�����Ե�����Ԫ��ֵӋ��
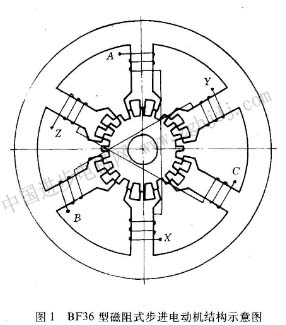
bf36���������ʽ���M늄әC�ĽY����D1��ʾ�������Ϲ���6���ŘO��ÿ�O����3�������X��ݠ������zr=20������ֲ��ľ����X�����D���X�رR18�ȡ�늙C��un= 24v��ln= 0.15a�����Ԇ���ͨ늣�Ҳ�����p��ͨ��\�С�
���С���Ԫ��ֵ�ⷨӋ�����ʽ���M늄әC���o�D�ء���ֱ������늙C�ň��ĴŹ���Ӌ��늴��D�صĹ�ʽ[1]��
ʽ�Ц�rһ�D�ӵĽ�λ�ƣ�rad��һ�D�ӵĽ�λ�ƣ�
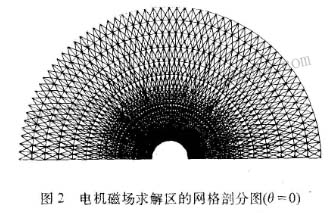
�������늙C���o�B�D�����ԣ����ؽ����ԣ��ͱ���о�늙C���ӴŘO��Ȧ�ڲ�ͬ����£��Լ��D�����������в�ͬλ�Õr�Ĵň��ֲ���r���������X��t�����ȣ���  ��λ��늙C�ň����Q����ֻ���о��낀�X�࣬��9�ȷ����ȸ���λ�õĴň���r���ɡ� �O���D���X���ľ����R�r��=0������늙C�ĽY����+ͨ늷�ʽ�ʹň����Q�ԣ����x���낀늙C�Ŀ��g����늙C�ň������^�D2ʾ���@�r���^�ľW���ʷ֡�
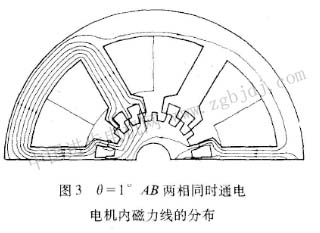
��ijһ��ֵ�´ŘO��Ȧͨ����������S�ň�������ԪӋ��[2]�ɵó��˕r���^��Ȳ����c��ʸ����λaֵ������Ԫ�Ĵ�ͨ�ܶ��Լ��L�����^�Ĵ������ֲ����D3չʾ�˦�=1�ȕr��a��b����ͬ�rͨ늵Ĵ������ֲ����ٽ���̎����Ӌ�㣬������ͨ늵ĴŘO��Ȧ����朵Ŀ���朦ס�Ȼ��׃����Ĕ�ֵ����Ӌ��ԓ��λ�õĴň��ʹŘO��Ȧ��朵Ŀ������ֵ���@�ӣ��؏Ͷ��Ӌ����ɵõ�һ�M��ͬ������������a���ĴŘO��Ȧ��朣����ó��ڴ��D��λ�æ���늙C������c��Ȧ���֮�g���Pϵ��=f(i).
 ����D���ڿ��g�Ħ�=0��형rᘷ���ÿ�D�^1�ȣ����؏�����Ӌ�㣬ֱ����=9��ֹ���@������Ԫ��ֵ�����н����W���Ԅ��ʷּ��g���������F��)���Ķ��ó�늙C������10�������D������λ�õĴ���c����g���Pϵ���D4��a���@�Mͨ늠�B�¦�=0�ͦ�=1�ȕr늙C�Ħ�=f(i)�Pϵ�������Ķ�����simpson�e�ַ���3���քe�����ijһ����¸�����λ�õĴŹ��ܱ�wm������i= in=0.15a����=0�r�ĴŹ���ֵ������߅��oaco����e����=1�ȕr�ĴŹ��܄t����߅��obco����e���؏��������E���������ڴ�����¦�=0.1��.2�ȡ���9�ȕr��������10���Ҏ�ĴŹ��ܣ�����wm������0��10�M����ֵ��Ȼ���������Θӗl��ֵ�������ֹ�ʽ(4)������ôŹ���wm�����Ȍ�����������ʽ(i)���ɵó����M늄әC���o�D����������t=f(��)���D5�͈D6��ʾԓ늙C���~���������ͨ늺̓���ͬ�rͨ늕rӋ�����õ��o�D�����ԡ��D7�͈D8�t�քe��ʾ�������Č��y�Y������������^��****�o�D�ص��`���چ���ͨ늕r�ǰٷ�֮5 .41������ͬ�rͨ늕r��ٷ�֮7.34��
< |