�\�ӿ��ƌ��ü����·�����ã��m3��
�T���ɣ��V������ƌW�о�����
��ժ Ҫ�� ���Ğ顰�\�ӿ��ƌ��ü����·�����ã��m2����Ҋ1992�꡶늙C����4�ڣ����mƪ����B���ü����·l297��l298���M늄ӄәC�������������ĽM�ɡ�ԭ�����벽������ʽ�ĸ��M��
���� �~�������·���M늄әC����������ԭ�����M
3 l297/l298 ���M늄әC������������
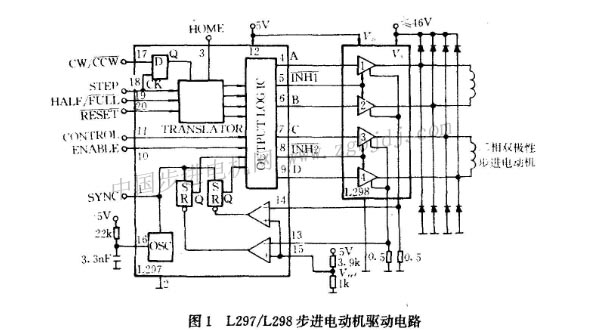
��Ƭ�IJ��M늄әC������l297�m�����p�O�ԃ��ಽ�M늄әC��ΘO�����ಽ�M늄әC�Ŀ��ƣ�����ݔ����̖���Կ���l298n���pȫ�����������M����늉�46v��ÿ��2. 5a���µIJ��M늄әC��Ҫ��Ҋ�D1����l297Ҳ�����Á����Ʒ������_���D���w���·�����Ӹ���늉�����������IJ��M늄әC���乤����ʽ�ǹ̶��ز��l�ʵ�pwm�����ز����ơ�
3.1 l298�pȫ������
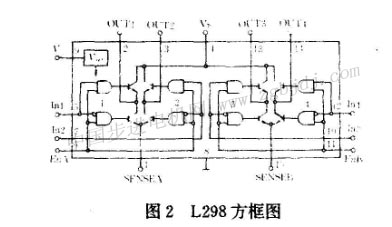
���ǃȺ��ɂ�h��ĸ�늉��������Ƭ�����·��Ҋ�D2��������4·�˜�tti��߉�ƽ��̖���������^�������Ȧ��ֱ��늄әC�Ͳ��M늙C��늸���ؓ�d��ÿ������±۾��w�ܰl��O�B��һ������_(1��15)�����Á��B�������裬���Դ�z�y�á�9�_��߉�Դ��ͨ����+5v��6�_��11�_��ʹ�ܿ��ƶˣ��քe��δ���ƃɂ���Ĺ������������^multiwatt��15�_�������ܷ⣬������ᔌ����̶���ɢ�����ϡ�
****���~������
vs �Դ 50v
vss�� ߉�Դ 7v
vi��vinh ݔ��ͽ�ֹ��̖늉�-0. 3�� 7v
i��ֵ������̕r(100/-is) 3a�� �B�m��ֱ���� 2a
���m(�ٷ�֮��ʮon���ٷ�֮��ʮoff)2. 5a
p �����ģ� 25w
3.2 l297���M늄әC������
l297����ģ�������ݵ�i2l��ˇ��20�_dip�ܷ⣬ͨ����5v��늣�ȫ����̖����ttl/cmos���ݡ�
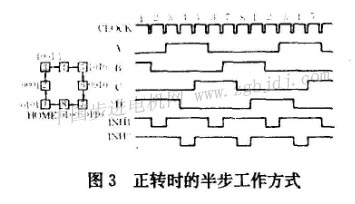
l297�ĺ�����߉�D�Q��(translater)�����a�����N������̖���������N��ͬ�Ĺ�����ʽ���벽��ʽ�ͻ������ʽ��һ�༤�����༤�����������λӋ��C������̖��������cw/ccw(�������D)��half/full���벽���������ࣩ�ɂ�������ʽ��̖���Լ�һ�����M�}�_(step clock)��̖��translator�Ȳ���һ��3bit����Ӌ����������һЩ�M��߉���a���������8�����״a�r����̖���@Ҳ���ǰ벽������ʽ�ĕr����̖���˕rhalf/full��̖����ƽ��ݔ������Ҋ�D3��
�D�б�ʾ��8����������abcd -0101�����B(home)��
��half/-fullȡ���ƽ���õ������������ʽ�����߉�D�Q���������攵��B(1��3��5��7)�t�ǃ��༤�ʽ����D4��ʾ�����߉�D�Q���x������ż����B��2��4��6��8)���t�dž��༤�ʽ����D5��ʾ��
��ֹ��̖����ٺ�nh2�ӵ�l298n��ʹ��ݔ��ˣ��书����ʹ�M����_��B���@�M�������˥�p���@�ɂ���̖�ǵ��ƽ��Ч�����ڈD4���༤������������ʽ�r���˃��ž�����ƽ���������@�Mһֱ�ڹ������]�Д��_��B��
��ֹ��̖�������ɈD6�f�����D�б�ʾһ���@�M�ӡ��Oa���ƽ��b���ƽ���������q1��q4��r5���^늙Cһ���@�M����a׃���ƽ���Эh������d2��q4��r5���@�M��˥�p�^����������������r5�ϵēp�ġ���ͬ�r���Ì�4�����w�ܶ��P�࣬�h���ĵؽ�d2��d3���Դv5������˥�\���Ķ��ӿ���늙C�Ą������˕r��r5�����^�m���������ʹ���^С���ʵ��������
�ɂ���ֹ��̖��a��b��c��d�á���߉���õ���
|