�\�ӿ��ƌ��ü����·������(1)
�T����(�V������ƌW�о���)
�����߰�����Ӽ��g�lչ��һ����Ҫ���������ƌ��ü����·�������\�ӿ���ϵ�y�е�늙C���ƣ��������_�l�˴����Č��ü����·�����ڸ��N�Ԅӻ��O�䡢�ƌW�x����Ӌ��C���O�Լ���������С��@Щ�����·�����Д���һģ�M��ϼ��ɣ������M�뵽�c��늉������ʵ��������·��ϣ��Ķ���׃�˼����·���ʵĸ��Ҳ�o늙C���Ǝ���O�㣻��������˿������ܡ��sС�w�e�����ҹ�ʡ�ɱ��������Ա����_ʼ�x��һЩ�д�����늙C���ƌ��ü����·���Խ�B���Դ��M늙C���Ƽ��g�İlչ��
��ժ Ҫ����Bһ�N�m������ֱ���ŷ�늄әC���ƵČ��ü����·�����Ќ�ԓ�����·�ĽM�ɡ���Ҫ�~������������ԭ������������Ԕ�����U����
���� �~��ֱ���ŷ�늄әCλ�Ìm�ӿ����ٶȿ��ƣ����ü����· ԭ�푪��
1 mc33030��ֱ���ŷ�늄әC������������
motorola��mc33030��һ�N�m������ֱ���ŷ�늄әC���ƵČ��ü����·���������ˏĽ��շ���ݔ����`��Ŵ�����ĩ��h���ʷŴ��һ���������]�h����ϵ�y���������^�����^�����o�ڃȣ�������λ���ŷ����ٶȿ��ơ�
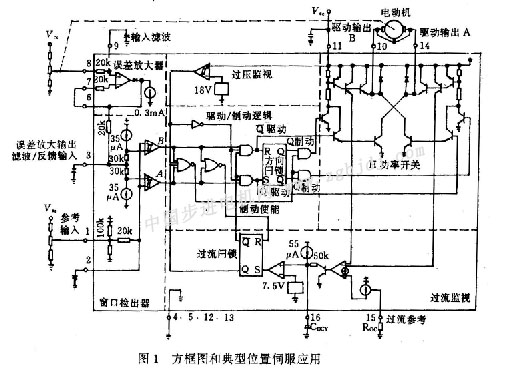
�·����DҊ�D1��������Ҫ�M�ɰ�����
���`��Ŵ���������ģݔ�뷶����
�����ڱ��^������һ�������^�����{�Ѕ���ݔ�롣
���з���ӛ�����ӣ��Ƅ�߉��
��h�����_�P��1a��������
�����O�õ��^���z������
�����O�õ��^��ͣ�C�r�ӡ�
���^늉��Oʾ��ͣ�C���o��
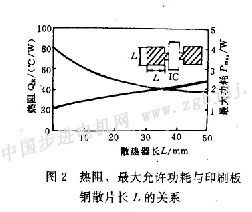
16�_�ܷ��p��ֱ��ʽ���b������4��5��12��13�_�ӵء��D2��ӡˢ�·�����~ɢ�����ߴ�(�Ll)�cԓоƬ�ğ��衢���S****�����Pϵ�D��
1.1��Ҫ�~������
�Դ늉�(vcc)��36v
ݔ��늉������� -0.3��36v
ݔ����늉������� -0.3��36v
��ݔ������� 1.0a
****���ģ� 1 000mw
�����Y�أ� 150��
�Y���՚���裺 80�棯w
�Y���⚤���裺 15�棯w
�����h���ضȷ����� -40��+85��
1.2����ԭ����λ���ŷ�����
�D1�o������λ���ŷ����ƌ�����ԓ�·������ݔ��늉���ʾ����λ�õġ��@��һ�_��ֱ���ŷ�늄әC���^�X݆��Ȝp�ٙC����ؓ�d��ͬ�r����һ���c�����ƙC�����B���λ�������λ��ȡ����̖���\��Ŵ������_���ˌ��Hλ����̖ݔ��o���ڱ��^��(3�_)��
���ڱ��^�����Ƀɂ�������ؾ��ı��^��a��b�M�ɡ�������2�_���܅���ݔ����̖������̖ͨ�^1�_����λ�����õ����������{��ϵ�y�Ľo��λ�á�3�_��̖���^���Դ�ӵăɂ����ݔ��o�ɂ����^�����Ķ��a����ƫ��늉����γ�һ�������^��
��������ϵ�y�����ԣ�оƬ���O����һ���`��Ŵ��������Ɍ����Hλ����̖���_��ŴŴ�r����ʹ���^����׃խ���Ŵ���ݔ�������������1.8ma�������250��a��
h�����_�Pֱ����늙C�͌��F�Ƅӣ�****�B�m���������������Ƅ������1a��****����Ҫ���]�D2��ɢ���������и�����Ҫ��Ʌ����D6��
��늙C���ӻ���D�r���^���Oʾ�·���o늙C���������O�������h��������һ��������������^������ˣ���ͬ��˄t�Dž������ֵ�����Ĵ�С��������r���Q������������������F�^���r�����^�����D������������t�����cdly�������늵�7.5v�r�|�l�^���V�i��������ƽ��ʹ�ӣ��Ƅ� |



