���M늄әC�\���D�صķ�������·�Ƅ��D��
������ �O��|�������I���I��W��
��ժ Ҫ�����ïB��ԭ���������M늄әC���B�\�Еr���@�M����ֽ��2�������������\���D�طֽ���c�@2�������������2���������M�������е������D�Б�늉��a���Ķ�·�Ƅ��D�ط������䌦늄әC�\�е������M���˷���������Ӌ�㹫ʽ�M����ԇ�У�ˡ����е�ӑՓ�����������J�R���M늄әC���\�����ԡ�����Ҏ�ɼ��OӋҎ�ɡ�
���� �~�����M늄әC�\���D�أ���·�Ƅ��D��
l ����
���M늄әC������Y�����\�з�ʽ�������ԣ��\���^���cһ��늄әC���^��IJ�ͬ���\����ՓҲ�h�������y늄әC���죬�@�o���M늄әC�đ��Î����ܶ�㡣���M늄әC�\������ͨ��fʽ��������εď��s�ԣ�������\���D�ص�Ӌ�㳣�����ò�������ֵ��������ֵ�����Ɍ����w�IJ��M늄әCϵ�y�M�з��棬�������ĽY������Ҫ���еó����ձ����x��Ҏ���Ե��J�R��߀���o֮�Ը����Ե���Փ������
���đ��õ���ԭ���������M늄әC�\�Еr���@�M����ֳ�2�������������늉��a����������������D�Б�늉��a������������������أ��\���D��Ҳ�ֳ�2�������ķ������Mһ�������D�Б�늉��a�����D�ط����M�з�����ԇ��о���
2���Wģ��
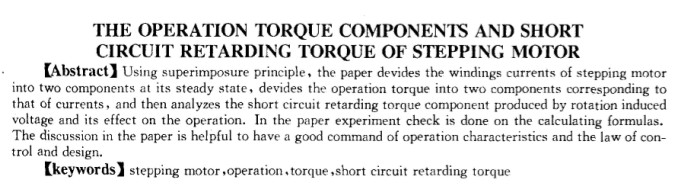
��������ʽ���M늄әC�ǽӘ�ʽ�ӵĵ���ϵ�y�����M�з����������·���ؓ�Y����D1��ʾ���@��һ���������Q�Y����ϵ�y��ֻҪ����һ������·����������ơ���a���·������
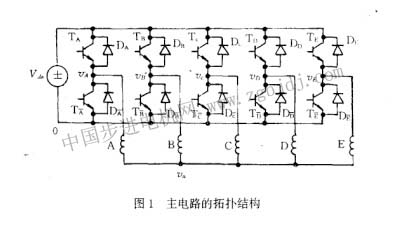
a��ta��ͨ�ria�������·���Դ���˽�ta��a�@�M���ٽ���������ͨ�����@�M�������Ĺ��Ź����Դؓ�ˡ�
b��ta�P���ria�������·��a�@�M�ȵ��������������������ͨ�����@�M�������Ĺ��Źܣ��ٽ��^dx�ص�a���@�M�Ķ��c�γ��]�ϻ�·����D2��ʾ��
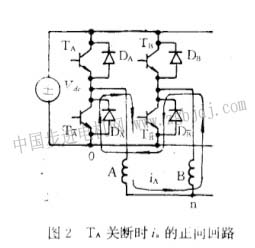
c��tx����ͨ�ria�ķ����·���Դ���˽���������ͨ�Ĺ��Źܼ����@�M����a���@�M����ͨ�^tx���Դؓ�ˡ�
d��tx����ͨ�ria�ķ����·��a�@�M�ȵķ�����������^da����������ͨ�Ĺ��Źܼ��������@�M�γ��]�ϻ�·����D3��ʾ��
��Ҋ��������һ���@�M����Փ��������۵Ĺ��Ź܌�ͨ�c����ͨ�������γ������������������Ļ�·�����H�ϣ����Ź�ֻ������ӹ��ż�늉������ã�ʹ����������ӵ���������@�M��ȥ��������һ���@�M����늉�����ʽ�飺
ʽ��vk--k���@�M�����늉�����Ҫ�c���ŹܵČ�ͨ��r���P���Dz��B�m����
r-���@�M��·�����
ikһһ���@�M�����
��k���@�M�Ŀ����
ljk�r��k���@�M���Ը�
j��k�r��k���cj���@�M�g�Ļ���
u��k����k���@�M�����D�Б�늉�
�ĵ��ӵĸ�����l��ʽ(2)�ɸČ��飺
�����أ�늴��D��Ҳ�ɷ֞�2����������
ʽ��t (1)������i k(1)��k=a��b��c��d��e������������ |