�\�ӿ��ƌ��ü����·�����ã��m4��
�T���ɣ��V������ƌW�о�����
��ժ Ҫ�����Ğ顰�\�ӿ��ƌ��ü����·�����ã��m3������Ҋ1993�꡶늙C����1�ڣ����mƪ����Bһ�N�m����С���ʲ��M늄әC�p�O���ӵ�pbl3717a��Ƭ�����·�Ĺ���ԭ�������M늄әC3�N�\�з�ʽ�Č��F��������ơ�
���� �~�������·���M늄әC���·ԭ���M�p�O�Լ��
4 pbl3717a���M늄әC����
pbl3717a��һ�N�m����С���ʲ��M늄әC�p�O���ӵĆ�Ƭ�����·����������pbl3717a����Ӌ��C���Լ��������Ԫ�������Կ��ƺ��Ӄ���������ʽ���M늄әC�����ӷ�ʽ������ز����ơ��Ⱥ�h���ʷŴ��������_�P��B���m����ÿ���늉�10��46v��****���С��ia���@
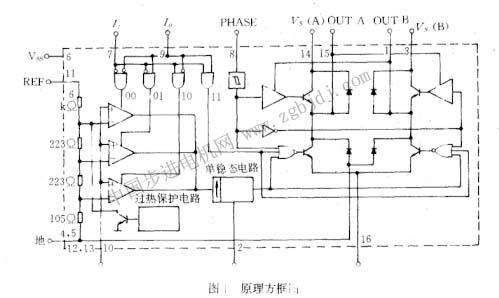
ʹ�íh���ض�0��70�档16�_�p��ֱ��ʽ���b����ӡˢ�·��������e��20cm2����Ȟ�35mm���~����ɢ��Ƭ�r�������s��40��/w��ԭ������DҊ�D1������Ҫ�M�ɲ��ְ�����
��ݔ��߉�·
��ݔ��hȫ���·
���ƽ���^�·
���η��B�·
���^�ᱣ�o�·
4.1�·����ԭ��
��4�����w�ܽM��hȫ�����_�P�·��ݔ���˞�outa��15�_����outb(16�_)����������۾��w�ܞ鹲�l��O����16�_�����������һ������أ�������z�y�á�outa��outb��Ӳ��M늄әC��һ���@�M�����������16ॵ���裬�����̖��rece�V�����10�_�ͽo������^���·����Ҋ�D2����4�����ʾ��w�ܾ����п��ٱ��o���O�ܣ����@�M�ṩ�m����·���@�M�������������8�_��phase��̖�Q���ġ���ʹ��ttl�ƽ�Ŀ�����̖�������ƽ�r�������outa����outb���˕ra����Ϙ�۾��w�ܳ��m��ͨ��a�������b�����Ϙ�۾��w�ܳ��m��ֹ��b������۾��w��ͬ�r�ܵ��η��B�·�����}���{����̖�Ŀ��ƣ�����̖���ƽ�r���w�ܽ�ֹ�����ƽ�r��ͨ�����@�M����M�Дز����ƣ�ʹ���S����һ����ƽ��ֵ�ȡ���phase����ƽ�r���@�M��������෴��phaseݔ����^˹�����|�l�·���������õ����������ã�߀�Еr���·������h���_�P�^��������۾��w�ܵ�ֱͨ��·��
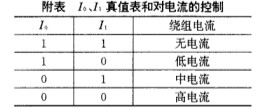
ݔ�������̖i0��9�_����i1��7�_����4�N�M��߉��B����3�����^���xͨ���������������£����F���@�M����Ĕ��ֿ��ƣ�Ҋ������
3�����^����ͬ��ݔ��˞鷴�������̖��������ݔ��˵ą���늉��Ǐ�11�_refݔ��늉�(���Õr�ɽ���+5v)�����։��õ����ɈD�з։�����֪�����ϵ���3�����^���ķ։��ȷքe��1��0. 60��0.19����i0i1���xͨ�����Կ����@�M����в�ͬ��ֵ����ƽ��ֵ֮�Ƚӽ�����������
����һ���^�����xͨ�r�����@�M������^�z�y��裬�����̖���������^����늉������^�����D��ݔ�����ƽ���|�l�η��B�·���γ�һ���}��toff���}�_��̖������۾��w���M���{�ƣ����Q������۾��w�ܵĽ�ֹ�r�g��toff��2�_��������ݾW�j�����Q�����У�
늙C���@�M������}�_��ռ�ձȺ��@�M�����Q����ͬ�ӣ���׃11�_ref�Ĵ�С�����Կ����@�M�����
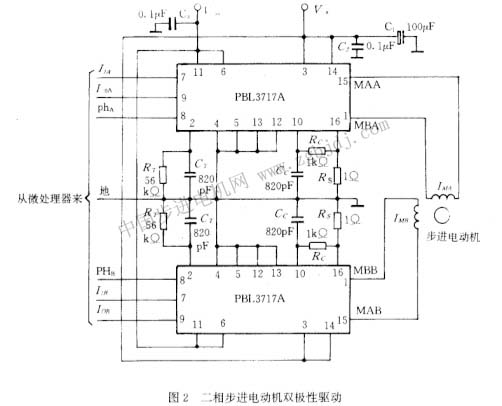
4.2�N������ʽ
�Ƀɂ�pbil3717a�ɽM��һ���Ӄ�����ʽ����늄әC���C����ϵ�y������Ӌ��C��ܛ���]֭�������_��i0��i1��phase�r����Ԍ��F���M늄әC��3�N�\�з�ʽ��
4.2.1�������������ࣩ������ʽ
��a��b��ʾ�����@�M�������������a��b��ʾ��������������Ɍ��F��������������ʽ�� |