���M(j��n)늄әC(j��)�(q��)��ϵ�y(t��ng)�Ć�Ƭ�C(j��)����
�n���� ������W(xu��)��
1 ����
���m��(y��ng)�����Ԅӻ�����Ҫ����(sh��)�F(xi��n)���C(j��)�C(j��)�^�ڙM��Ϳv�߶ȷ���λ�õ��Ԅ��{(di��o)������׃�������ք��{(di��o)��(ji��)�����IJ��Æ�Ƭ�C(j��)���ƣ�ʹ�ò��M(j��n)늄әC(j��)�(q��)�ӈ�(zh��)�ЙC(j��)��(g��u)�����_(d��)������ǰ���^���к��C(j��)�C(j��)�^λ���{(di��o)��(ji��)��Ŀ�ġ�
2���M(j��n)늄әC(j��)�(q��)��ϵ�y(t��ng)
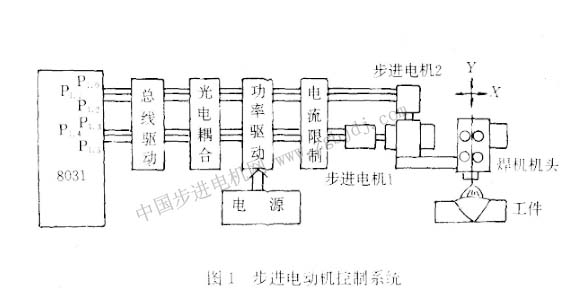
���C(j��)�C(j��)�^�M��Ϳv��λ�õ��{(di��o)������2�_���M(j��n)늄әC(j��)ͨ�^ʮ�ֽz�܂���ϵ�y(t��ng)���τӺ��C(j��)�C(j��)�^�M(j��n)�ЙM��Ϳv��Ķ��S�\(y��n)�ӡ����M(j��n)늄әC(j��)�(q��)�ӿ��Ƅtʹ��mcs -51ϵ���е�8031��Ƭ�C(j��)�M(j��n)�У�ͨ�^8031��Ƭ�C(j��)��p1�ڿ���2�_���M(j��n)늄әC(j��)����ܛ����2�_���M(j��n)늄әC(j��)�M(j��n)�з֕r(sh��)�(q��)�ӣ�����1�_���M(j��n)늄әC(j��)���(q��)�ӿ���ϵ�y(t��ng)����ԭ����D1��ʾ��
2.1��늸��x�·
����Ч�����Ƹɔ_�����ϵ�y(t��ng)�Ŀɿ��ԣ��چ�Ƭ�C(j��)�c���M(j��n)늄әC(j��)�����(q��)�Ӿ�·֮�g�����ù����������M����D2��ʾ�Ĺ�늸��x�·���������nj�(sh��)�F(xi��n)�ˆ�Ƭ�C(j��)�c�ⲿ�·��ͬ�ƽ���D(zhu��n)�Q�������Д��ˆ�Ƭ�C(j��)�c���M(j��n)늄әC(j��)�(q��)���·֮�g늵�ֱ��(li��n)ϵ��ͬ�r(sh��)��(sh��)�F(xi��n)�ˆ�Ƭ�C(j��)ϵ�y(t��ng)�c���M(j��n)늄әC(j��)�(q��)��ϵ�y(t��ng)�ؾ��ķքe(li��n)�ӣ��Է�ֹ̎�ڴ����������ؓ(f��)�d�¹������(q��)���·�a(ch��n)���ĸɔ_��̖ͨ�^��·���룬��Ӱ푆�Ƭ�C(j��)������������
2.2�����(q��)�Ӿ�·
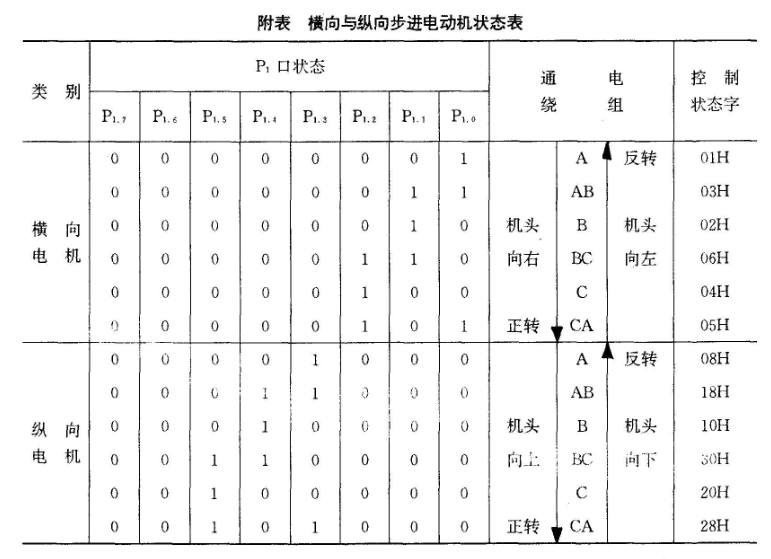
�x�õIJ��M(j��n)늄řC(j��)��̖��75bf003���乤����ʽ���������ģ�����Ǟ�1.5�ȣ�����늉���30v��ÿ���o�B(t��i)���4a������O(sh��)Ӌ(j��)����D3��ʾ�Ĺ����(q��)���·�����Դ��������׃������(j��ng)������������ݔ��30v��4a����������o���M(j��n)늄әC(j��)�����@�M����8031��Ƭ�C(j��)��p1��������ƶ˿ڣ�����(j��)���M(j��n)늙C(j��)��ͨ늷��䷽ʽ��ݔ�������ֹ�(ji��)����(j��ng)һ���ӕr(sh��)���a(ch��n)��ռ�ձȞ�i:i�ľ��β�����(j��ng)�(q��)���Դ���ʷŴ�ɷքe���ƙM��߶ȷ����M(j��n)늄әC(j��)�������@�M��ͨ늠�B(t��i)���(q��)�Ӳ��M(j��n)늄әC(j��)��ָ��������ٶ��\(y��n)�D(zhu��n)������ͨ�^�����O(sh��)���M(j��n)�з֕r(sh��)�(q��)�ӣ�2�_���M(j��n)늄әC(j��)�Ĺ����(q��)���·����һ��(g��)�Դ���ڹ����(q��)���·�в������_(d��)���D�ܞ鹦�ʴ�������ʹ�·�Y(ji��)��(g��u)��麆����
3���M(j��n)늄әC(j��)���\(y��n)��30v
3.1�D(zhu��n)�����
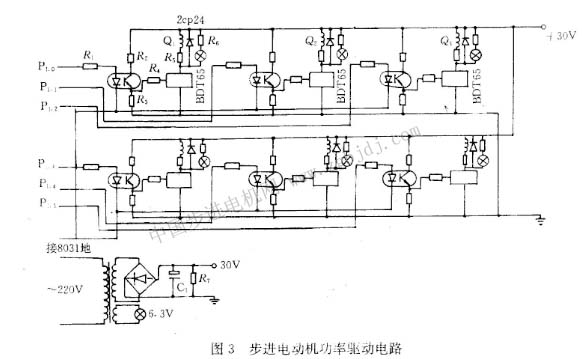
���M(j��n)늄әC(j��)�\(y��n)�з���Ŀ��ƣ���ͨ�^8031��Ƭ�C(j��)p1�˿ڵ�p1.0��p1.2ݔ���M���M(j��n)늄әC(j��)a��b��c�����@�M�Ŀ�����̖��p1.3��p1.5��ݔ���߶ȷ����M(j��n)늄әC(j��)��a��b��c�����@�M������̖�����O(sh��)��ݔ����1�r(sh��)�@�Mͨ늣���0�r(sh��)��늡�����(j��)���M(j��n)늄әC(j��)�����ԣ���һ����߉����ʹ8031��Ƭ�C(j��)��p1�ڵ���̖ݔ�������x���IJ��M(j��n)늄әC(j��)����ָ����ͨ늠�B(t��i)����ͳ������ֹ�(ji��)����ɿ��Ʋ��M(j��n)늄әC(j��)�ĸ����@�M���s����ͨ늠�B(t��i)���ͨ늣��(q��)�Ӳ��M(j��n)늄әC(j��)형r(sh��)ᘻ���r(sh��)ᘷ����\(y��n)�D(zhu��n)����(d��ng)�������ಽ�M(j��n)늄әC(j��)���������ķ�ʽ�\(y��n)�D(zhu��n)�r(sh��)����ͨ늠�B(t��i)׃�Q���?y��n)�?/div>
���M(j��n)늙C(j��)������(sh��)�Ŀ��Ʒ�ʽ�_��֮��p1.0��p1.5��ݔ����(sh��)��(j��)׃��Ҏ(gu��)��Ҳ�ʹ_����һ��Q��ݔ��ģ�͡��ڿ����^���У����˱��ڌ��ң���ݔ��ģ�����Ԕ�(sh��)��(j��)����ʽ�����eprom�У��̔U(ku��)�\(y��n)�Еr(sh��)��ͨ�^���ָ��movc a��@a+pc�͂���ָ��movp1��a��ʹp1��ݔ����ͬ��ֵ���x��ͬ����IJ��M(j��n)늄әC(j��)�͛Q��늙C(j��)���D(zhu��n)�ӷ���
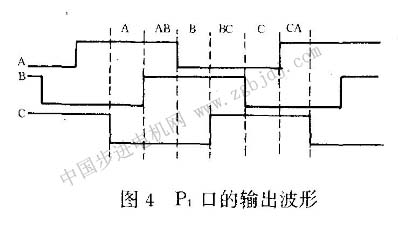
�M��Ϳv��IJ��M(j��n)늄әC(j��)���������Ĺ����r(sh��)��p1�ڵ�ݔ�����κ�����B(t��i)��ֵ���քeҊ�D4��������
��(d��ng)8031��Ƭ�C(j��)��(zh��)�Ђ���ָ��r(sh��)���������еĔ�(sh��)��(j��)���ȡ��������p1ݔ���˿ڣ�ÿݔ��һ��(g��)���Ơ�B(t��i)�֣����M(j��n)늄әC(j��)�D(zhu��n)��һ�����B�m(x��)ݔ�������M(j��n)늄әC(j��)�B�m(x��)�\(y��n)�У�����ݔ�������M(j��n)늄әC(j��)�����\(y��n)�У�ֹͣݔ�������M(j��n)늄әC(j��)�tֹͣ�\(y��n)�С�
3.2�D(zhu��n)�ٿ���
���M(j��n)늄әC(j��)�D(zhu��n)�ٿ�����ͨ�^�����ӕr(sh��)�ķ���������(d��ng)cpu�ͳ�һ�M��(sh��)��(j��)���M(j��n)���ӕr(sh��)�����ӕr(sh��)��ȡ�ڶ��M��(sh��)��(j��)ݔ��������ӕr(sh��)�L���D(zhu��n)�پ������ӕr(sh��)�̣��D(zhu��n)�پͿ졣ͨ�^��׃���M(j��n) |