���M늄әC��ʧ�{�Ǽ�����
������ ����� (�����I���I��W)
��ժ Ҫ�����M늄әC��ͬ��늄әCһ�ӣ���ؓ�d�D�ص������£��D�ӴŘO���ľ��������ښ�϶�ň������ľ�һ���Ƕȣ��Q��ʧ�{�ǡ����_�h����ϵ�y�У�ؓ�dʧ�{�nj�����һ����ʧ���������}�_����������ʧ������ֵ�r�����c늄әC��ͨ늷�ʽ����Ҫ��߉ͨ늠�B������ͨ�����f���\���Ĕ����P���ɴ����_�����Ӽ��g���_�h����ϵ�y�Б��õľ����ԡ�
���� �~�����M늄әC���_�h���ƣ����ȣ�ʧ�{�ǣ���ʧ����
1 �� ��
���M늄әC�����ŷ����������������\�о������˂�ʮ���P�ĵ�һ�����}�����M늄әC�����\�����_�hϵ�y�У��]��λ�Ùz�yԪ�����������ƣ�����\�еľ�����Ҫȡ�Q�ڲ��M늄әC�������Cе����ϵ�y�����M늄әC����ϵ�y���OӋ�ߣ����������M늄әC�IJ���Ǿ������Ҫ�����ڵõ��^�õ��\�о��ȡ����ϣ��@����ؓ�d�D��ʮ��С��ϵ�y���f�����_�ģ�������ؓ�d�D���^���ϵ�y��������`��ܿ��ܲ���ʮ����Ҫ�ģ�ʧ�{�ǵ�Ӱ푿��ܸ���һЩ�����dz�������ҕ�ˡ�����б�Ҫ���@�����}��һЩ���A���f������ӑՓһЩ�cʧ�{�����P�ľ��Ȇ��}�������M늄әC����ϵ�y���O֭�ߣ���һ���ą����rֵ��
2 ʧ�{��[1]
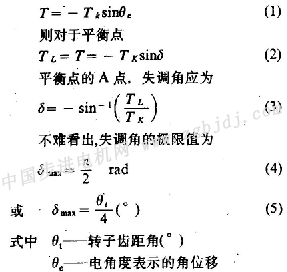
���M늄әC��ijһͨ늠�B�£��D�Ӳ���ؓ�d�D�ؕr��һ���ķ���ƽ��λ�ã���Dla�е�0�c�����ÈDlb�f���@�r�D�ӵ�λ�á��D���ܵ������D��tl�r����ƫ�x����ƽ���c���D�ӴŘO���ľ������ڶ��ӴŘO���ģ����ÈDlc��ʾ��tl�����^****�o�D��tk�r������һ�µ�λ���_��ƽ�⣬��Dla�е�a��a�cƫ�x0�c�ĽǶȦı���ԓ�\��
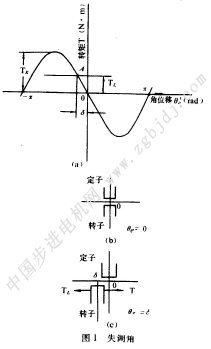
��r�µ�ʧ�{�ǡ���Ҋ��ʧ�{�ǵ�ֵȡ�Q��ͨ늠�B��ؓ�d�D�صĴ�С���ؽ����ԵIJ��Ρ�Ҫ֪�����ľ��_ֵ����һ���������飬���nj�����һЩ����Ͷ��Եķ����Dz��y�ġ������ٶ��ؽ����������Ҳ���������
3 �D��ʧ����
�ڿ���ϵ�y�У����M늄әC�������Ԫ����ͨ�^���әC�����ӿ��ƌ����\�ӣ����电�ؙC���еĵ��������әC���Ϳ��ƌ�����늄әC��ؓ�d���ڹ����^�����\�ӻ��oֹ�r���������F��һ����ؓ�d�D�أ����Ҳ������������ʧ�{�ǡ�������ͬ��r��ؓ�d�D�ؿ����Ǻ㶨�ģ�Ҳ������׃���ģ������ஔ��Ҳ���ܺ�С��߀������һ������ȫ�_����ֵ���Ԕ���܇�������������Ƶ����M�o�IJ��M늄әC������������ͬ�r�������ܵ�ؓ�d�D�ر㲻ͬ�����Еr���^���ؓ�d�����ڴ���ƽ���L�D�x�У����M늄әC�����L�D�^�\��ϵ�⸡֧�Σ��\�ӕrĦ��������С����늄әC���f�ɺ��Բ�Ӌ������������ʧ�{��Ҳ�ͽӽ����㣻���ڿ��Ɣ��ؾ��и�C�������_�\�ӵ��@�ؓ�d��늄әC����Ҫ���܂��әC����Ħ���D�أ�����늄әC��һ���IJ��_���ԣ���������ؓ****ֵ֮�g��
ؓ�d�D�������ʧ�{�ǣ�ʹ���M늄әC�_�h�\�Еr�п���ʧȥһ�����\����(��λ��)�����磬�O���M늄әC����һ�����_ؓ�d��ؓ�d���D��������D2a��ʾ���O�ڜʂ��B�r���D��ǡ����0�c��������ʧ�{�Ǟ��㡣�o늄әC��һϵ�п����}�_��̖�����Ӵň��D�^�˦Ƚǣ����ߌ����ķ���ƽ���c�D�^�˦Ƚǣ��@�r�D���D�^�ĽǶȺܿ����Ǧȡ����ȦȲ���һ��ʧ�{�Ǧ�(�Ğ�ֵؓ)��

��Ҋ���D���ƺ��D����������˦Ľǣ������@�������D�^�ĽǶȣ����\�ӵ�һ�_ʼ��ʧȥ�ˡ����\�ӄ��_ʼ���Ȳ������ӴŘO���ľ��c�D�ӴŘO���ľ����_�ľ��xС�ڦĕr��늴��D�ص�ֵ��t��С���D�ӱ㲻���ӣ�ֱ���ȵ�ֵ���^�Ğ�ֹ��
ͬ�ӣ���늄әC�����D�^�ȽǺ��ַ����D�ئȽǣ������ӴŘO���ľ��˻ص�ԭ��λ�Õr�����ڷ����\�ӕrؓ�d�D��Ҳ�����D���Ԯa���������\�ӷ����ʧ�{�ǣ���D2c��ʾ�����y������늄әC���ߕr�D��ʧ������2�ġ��cǰ���ƣ�ʧ�������ڷ��D�_ʼ�A�ήa���ġ���鱾����ǰ���D�ӦĽǵĶ��ӴŘO���ľ������D�\�ӄ�һ�_ʼ��׃�ɜ������D�ӦĽǡ�ֻ�Ю����ӴŘO�D�^2�ĕr���a����늴��D�ز������ct��ƽ�⣬�����D���\�ӡ����ԣ�ֻҪ���D�\�У���Փ�г��Ƕ��٣������ܮa���@�ӵ��D��ʧ����(��l)

| 


