������ʽ���M늄әCͨ늷�ʽ���о�
������ ꐾ��| ������ (�����I���I��W)
��ժ Ҫ������������ʽ���M늄әC��߉ͨ늷�ʽ������˸�׃������\�е��·�����ͬһ�_������ʽ���M늄әC�͵��͵��������ż����H�H��׃߉ͨ늷�ʽ���Ϳɫ@�ñȵ���ֵСһЩ���һЩ�Ķ�N��ͬ����ǡ�ԇ��C��������������Ŀ����ԣ����o���˸�׃������\�Еr늄әC�\������׃����Ҏ�ɡ�
���� �~�����ʽ���M늄әC����ǣ�ͨ늷�ʽ
1 �� ��
������ʽ���M늄әC��70������ڵ��Č����aƷ���҇�����1987���_ʼ�lչ�����ģ����������Ѓ������\�����ܶ������ՏV������ͮaƷ�IJ������o��36����o��72�����քe�����ڰ벽(4��5ͨ�)������(4��4ͨ�)ͨ늷�ʽ��
���M늄әC���õĈ��Ϸdz��V����ؓ�d��r�͌��\�����ܵ�Ҫ�������ͬ��ֻ���aһ�N���ٔ��N����ǵ�늄әC�������y�ԝM�㲻ͬ�Ñ���Ҫ�������Ñ������е�������Ͳ����㡣Ȼ��������ij�N����һ����͵�늄әC��Ҫ��׃�����ͨ���J����ζ��Ҫ��׃늄әC�Ķ��D���X������Ҫ����Ķ��Ӻ��D�ӛ_Ƭģ�ߡ���ˣ����a����IJ�ͬ����ǵ�Ʒ�N����ʹ���a���s�������r�^����ܵ����ơ�
���ĵ��о������׃����ǵ��·�������ͬһ�_������ʽ���M늄әC�����͵����������·���H�H��׃߉ͨ늷�ʽ������ԫ@�ö�N��ͬ�IJ���ǣ��ԝM�㲻ͬ��ʹ��Ҫ���@��ʹ�îaƷ���m��������������S�ң���ʹ�aƷ��Ҏ��Ʒ�N�p�٣�ͬһҎ��늄әC�aƷ�������������a�õ�ģ�߹��b�ͽM�����������������@�Ľ���Ч�档�����Ñ����µIJ��M늄әCϵ�y�IJ���ǿ����x���Ը�׃�������ڂ��әC���OӋ�ĺ����������ṩ�˲�ȡ�����`��Ŀ��Ʒ����Ŀ����ԣ������ڵ����\�Еrʹ�ñM����С�IJ���ǣ������ϵ�y�����\�е�ƽ���Ժͷֱ��ʣ����ڸ��ٕrʹ�ô�һЩ�IJ���ǣ�����߿�����ָ�˵ȣ����������Cϵ�y���ܵĸ��M��
�@�N�����ё�����������ľ�����ʽ���M늄әCϵ�y��ʹ�ò��M늄әC�IJ������һ�������Ȏ����Ԟ�����ֵ[1,2]�������nj������^�V��������ʽ���M늄әCͨ늷�ʽ��ϵ�y�M���о���
2�˜�ͨ늷�ʽ��
������ʽ���M늄әC���傀���@�M��ÿ���@�M������ͨ늺ͷ���ͨ�2�N��B������һ���@�M�Ϊ�ͨ늵Ġ�B����lo������  ��ͬ��һ���@�Mͨ늠�B�a�����D�ؽ��Ƶؿɿ����Dz�ͬ��λ�����Ҳ��������������ķ�ֵ����ȡ�
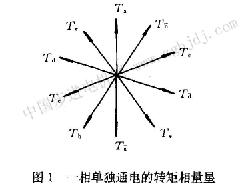
��������ʾ�r����һ����ʮ���Σ���D1��ʾ��
�˜ʵĻ���͵�ͨ늷�ʽ��������һϵ�е�ͨ늠�B��������һ����߉����׃�������ծa���M���ܴ���D�غ;���IJ���Ǵ_�����������@�Mͬ�rͨ늕r���o�D�ش��w�Ͽ�����ÿ���D���������ӵķ�ʽ��Ӌ�����@Ȼ���D1���������傀������ӕr��������ͬ�rͨ늕r�ɫ@��****�ĺϳ��D�ء�
�D1��ʾ�������Ă�������ӣ�������ͬ�rͨ늕r�����ԫ@�ýӽ�****�ĺϳ��D�ء�
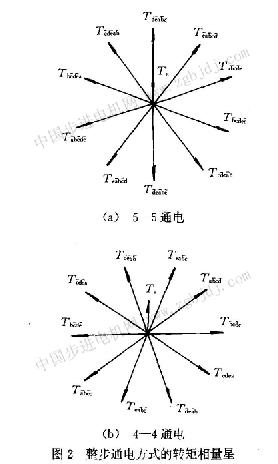
�@2�M�ϳ��D���������քe����2����ͬ����ʮ���Σ���D2��ʾ����ʾ2�N����ʮ��(m1=10��5��5ͨ늺�4��4ͨ�)������ͨ늷�ʽ�и��N��ͬͨ늠�B���D�ء����������g�ĊA�ǣ��������IJ���Ǟ飺
��4��5ͨ늣��ɵ�20�Nͨ늠�B(Ҋ��1)�����������ʮ��(m1=20)�İ벽ͨ늷�ʽ���D2�����D�������ǵ�����һ�𣬾�20���D���������ɵ��µ��D���������ΈD�����������g�ĊA�ǣ����벽�r�IJ���ǜpС��һ�롣
|