���M(j��n)늄�(d��ng)�C(j��)���(q��)��(d��ng)λ���]�h(hu��n)���Ƶ��о�
������ �����壨�����I���I(y��)��W(xu��)��
��ժ Ҫ�������U�����M(j��n)늄�(d��ng)�C(j��)�����(q��)��(d��ng)ԭ������(sh��)�F(xi��n)���g(sh��)��Ȼ��������(q��)��(d��ng)λ���]�h(hu��n)���Ƶ�ԭ�������Ƴ������̣�����B��8031��Ƭ�C(j��)��(g��u)�ɵĿ����������o��ԇ�(y��n)�Y(ji��)����
���� �~�����M(j��n)늄�(d��ng)�C(j��)�����(q��)��(d��ng)λ���Ԅ�(d��ng)���ƣ��]�h(hu��n)���Ɔ�Ƭ�͙C(j��)
1����
���M(j��n)늄�(d��ng)�C(j��)��Ҫ�з���(y��ng)ʽ������ʽ�����ʽ��3�N��ͣ��䃞(y��u)�c(di��n)�ǣ���(sh��)��ʽ���ƣ��ɱ��ͣ����D(zhu��n)�ӑT�����o(w��)Ư�ơ��o(w��)�۷e��λ�`���Ѹ�ټӜp�ٺ�ͣ�C(j��)������ʽ�ͻ��ʽ��ͣ늕r(sh��)���^�߶�λ�D(zhu��n)�ء���Ҫȱ�c(di��n)�ǣ��D(zhu��n)�QЧ�ʵͣ�����С���ֱ��ʵͣ��ٶȵͣ��ЁG���F(xi��n)��͵��l��ʎ�F(xi��n)��
�S�����M(j��n)늄�(d��ng)�C(j��)��Ӌ(j��)��C(j��)���Ƽ��g(sh��)�İl(f��)չ�����M(j��n)늄�(d��ng)�C(j��)�Ĺ������ܵõ��ܴ���ߡ������g(sh��)��ʹÿ����(x��)�ֳ�125������ࡣ�]�h(hu��n)���Ƽ��g(sh��)����˲��M(j��n)늙C(j��)��λ�ÿ��ƾ��ȡ��\(y��n)�з�(w��n)���Ժ�ƽ��ݔ��Ť��[2]��
��(microstep)�ĸ�������70�����������ġ��M(j��n)�����о�[3 4]������(sh��)�ͻղ�������Ҫ�ɿ������Ͳ��M(j��n)늄�(d��ng)�C(j��)�����ԛQ������ ������x����2�N�������ٻ����D(zhu��n)��һλ���������ڻ��ڰ��B�m(x��)�Ĵň�(ch��ng)�xɢ����
���M(j��n)늄�(d��ng)�C(j��)�]�h(hu��n)���Ʒ�����Ҫ�к˲���λ���]�h(hu��n)���ƺͳ�ǰ���ٶ��]�h(hu��n)���ơ�
2���(q��)��(d��ng)���g(sh��)
��(sh��)ns=8���D(zhu��n)���X��(sh��)nr=6���tÿ�D(zhu��n)����(sh��)�飺
���ؽǞ飺
r=360��/n=15��
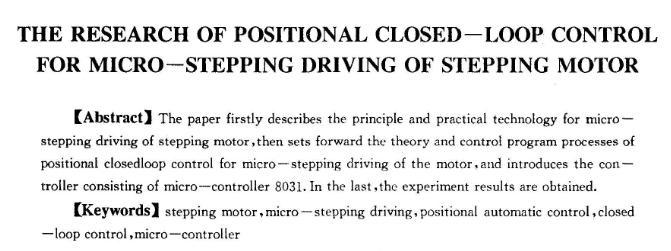
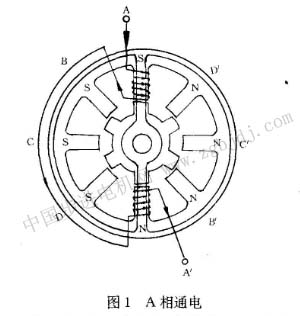
��(d��ng)a��ͨ늕r(sh��)���D(zhu��n)��ͣ���ca�ඨ�ӌ�(du��)��(zh��n)�Ġ�B(t��i)��Ҋ(ji��n)�D1����(d��ng)a��ͨ��D(zhu��n)��b��ͨ늕r(sh��)�D(zhu��n)����r(sh��)��D(zhu��n)�^(gu��)15�ȡ���(d��ng)a��ͨ��D(zhu��n)��ab��ͨ늕r(sh��)��Ҋ(ji��n)�D2�����D(zhu��n)����r(sh��)��D(zhu��n)�^(gu��)7.5�ȣ���λ��ab�����g��һ��(g��)�ƽ���c(di��n)����(d��ng)b��ͨ늕r(sh��)�������������ֱ�������~��ֵib�����ǰ���ֳ�n��(g��)��λ�����
2.1���M(j��n)늙C(j��)���(q��)��(d��ng)ԭ��
�D1 a��ͨ�ʹb������S�@��(g��)�A���f����ͨ늠�B(t��i)��(du��)�ڈD1��ʾ���ಽ�M(j��n)늄�(d��ng)�C(j��)�������X��׃���飺
��ô�D(zhu��n)�ӌ���ÿ��(g��)����B(t��i)ab,�_(d��)��һ��(g��)�µ��ƽ���c(di��n)��abi�cabf��֮�g����(g��u)��һ����a��������^(gu��)���е����^(gu��)�̞飺
�t�������(q��)��(d��ng)�IJ���ǹ�ʽ�飺
ʽ��n-����(sh��)��n����ÿ�D(zhu��n)����(sh��)
2.2���(q��)��(d��ng)���g(sh��)��(sh��)�F(xi��n)
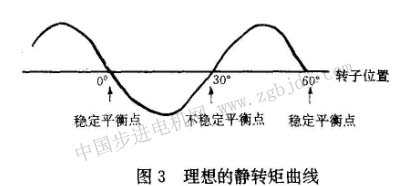
���(q��)��(d��ng)���g(sh��)��(sh��)�F(xi��n)���P(gu��n)�I�Ǹ����@�M������x��һ�㰴�o�D(zhu��n)��λ�������x����������nj�(sh��)�H�IJ��M(j��n)늄�(d��ng)�C(j��)�o�D(zhu��n)��λ�����������LjD3��ʾ�������������������⣬��������o�D(zhu��n)�ص��P(gu��n)ϵҲ���ܾ��_��������ˣ����ˌ�(sh��)�H���\(y��n)�ú�Ӌ(j��)��C(j��)�������ı�����һ���������������������ؽǵIJ������@��ͨ�^(gu��)�����ֶ��M(j��n)�и��ơ�
���Č�(sh��)�(y��n)ϵ�y(t��ng)�еIJ��M(j��n)늄�(d��ng)�C(j��)�����C(j��)���˵�ijһ�P(gu��n)��(ji��)�(q��)��(d��ng)��������������ʽ���M(j��n)늄�(d��ng)�C(j��)�����ؽ�1.8�ȣ�����ͨ����(q��)��(d��ng)�r(sh��)�������������Ҋ(ji��n)�D4��
��(d��ng)늙C(j��)ͨ�ԈD4��ʾ�������ҵĸ�������r(sh��)�����M(j��n)늄�(d��ng)�C(j��)형r(sh��)����\(y��n)�С�׃�����A�������(du��)��(y��ng)�Ĕ�(sh��)��ֵ����e��prom�У����IJ��ð�λd/a�D(zhu��n)�Q���ʔ�(sh��)��(j��)������0��255������(sh��)Ҳ��1��255����(sh��)�(y��n)ϵ�y(t��ng)�� |