�\(y��n)��(d��ng)���ƌ��ü����·����(y��ng)�ã��m(x��)6��
�T���ɣ��V������ƌW(xu��)�о���)
��ժҪ�����Ğ顰�\(y��n)��(d��ng)���ƌ��ü����·����(y��ng)�ã��m(x��)5������Ҋ1993�꡶늙C(j��)����3�ڣ����m(x��)ƪ����Bһ�Nixmsiso����������������Ĺ���ԭ�������c(di��n)���ڲ��M(j��n)늄�(d��ng)�C(j��)��������еđ�(y��ng)�á�
���� �~�������·���M(j��n)늄�(d��ng)�C(j��)�����������ԭ�푪(y��ng)�����澀�ԶȰٷ�֮1. 6��
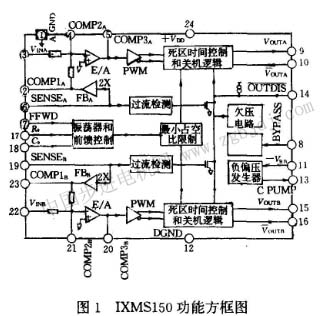
6 ixmsiso�������ppwm���������
ixms150��һ�N������cmos��Ƭ�����·�����Ѓ�·pwmݔ�������(q��)��(d��ng)�ɂ�(g��)��(d��)����h���M(j��n)�о��_������]�h(hu��n)���ƣ����ԣ������m���ڃ��ಽ�M(j��n)늄�(d��ng)�C(j��)��������ơ��������иߵľ��ȣ����M(j��n)늙C(j��)��(x��)�ֿ��������^250��(g��)������(du��)��200����r�ij�Ҋ�ă�����ʽ���M(j��n)늙C(j��)����(x��)�ֿ�����50000����r���������������˲��M(j��n)늙C(j��)ϵ�y(t��ng)���\(y��n)��(d��ng)���q�ʣ��������@�p���˵����ٶȼy�����C����Ҳ�����Á����ƃ��_(t��i)ֱ��늄�(d��ng)�C(j��)�����ڙC(j��)���ˡ���ӡ�C(j��)���L�D�C(j��)��x-yƽ�_(t��i)�ȃ�����(bi��o)��λ�ÿ���ϵ�y(t��ng)������ixms150�ɜp��Ԫ���ɱ���ӡˢ�·����e���O(sh��)Ӌ(j��)�r(sh��)�g���Ķ���������(g��)ϵ�y(t��ng)�ijɱ���ͬ�r(sh��)Ҳ�����ϵ�y(t��ng)�Ŀɿ��ԡ�
6.1���c(di��n)
���pͨ��ͬ��pwmݔ����
�����l�ʷ���20��400khz��
��ݔ������������2.0v���M�̶ȡ�
�����������̖(h��o)����ʿ0. 625v���M�̶ȡ�
����ͨ������ƫ��ٷ�֮һ���������·�{(di��o)��ƽ�⣩��
��ǰ���a(b��)��늄�(d��ng)�C(j��)�Դ׃��
��ÿ��(g��)h��ֻҪһ��(g��)���������衣
���ɼ�(j��)������ơ�
��Ƿ늉��i����
����(du��)������ϖŘO�(q��)��(d��ng)��ռ�ձ����ơ�
�������������^(q��)�r(sh��)�g�O(sh��)����
����ؓ(f��)늉��Դ�l(f��)����
���ΘO���Դ��늡�
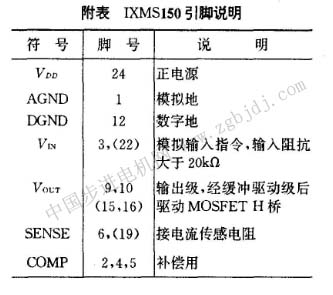
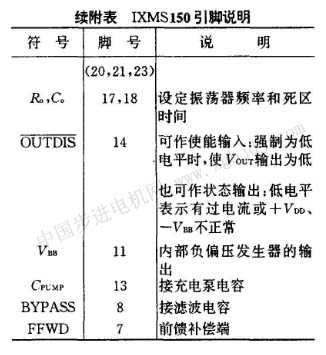
ixms150��24�_dip���b�����_�f��Ҋ��������������̖(h��o)�ı�ʾb��ͨ�������_������(y��ng)�o(w��)��̖(h��o)�ģ��t��a��ͨ�������_��
6.3�����M���c����ԭ��
�������·�ă�(n��i)������DҊ�D1������5��(g��)��Ҫ���ֽM�ɡ�
����ʎ���cǰ���·
������늄�(d��ng)�C(j��)�����ģ�M�·
����(du��)h���늙C(j��)�����������ı��o(h��)�·
��pwm�·
��ؓ(f��)ƫ���·
6.3.1��ʎ��
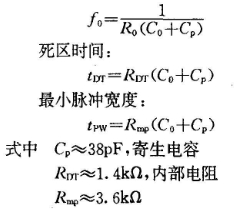
��(n��i)����ʎ������ro��co�{(di��o)���������Q������ʎ�����_�P(gu��n)�l�ʡ����^(q��)��С��9��10��15��16�_ݔ����̖(h��o)����С�}�_���ȡ�r��ʹ�÷�����15��look�أ�co�ķ�����100��2000pf��
��ʎ���l�ʣ�
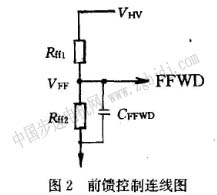
6.3.2ǰ���a(b��)��
��(du��)�ڹ̶��l�ʵ�pwm����ϵ�y(t��ng)�����_�h(hu��n)���桢늙C(j��)���׃���ٶȡ�����y��������Դ늉������ȡ��������S�Դ늉���׃����ʹ�@�Nϵ�y(t��ng)�y���O(sh��)Ӌ(j��)�����]�����r�������ˎ�������ˣ��ڱ��·��(n��i)������ǰ�����g(sh��)�M(j��n)���a(b��)����ʹ�_�h(hu��n)�����cffwd�_늉��ɷ��ȣ�ͨ����늉��H��늙C(j��)�Դ늉��Ď�֮һ���@�ӣ��_�h(hu��n)�����늙C(j��)늉��o(w��)�P(gu��n)��ϵ�y(t��ng)������������
�ڱ�ic�У���ʎ��늉����εķ�ֵ������(g��)ϵ�y(t��ng)�����涼��ffwd�ϵ�늉��{(di��o)�ơ���늉�ͨ��ȡ3. 5v������ǰ�����ƕr(sh��)����늙C(j��)���늉�vhv�����։��õ�ffwd�ϵ�늉�vff��ͬ�r(sh��)����cf-fwd�V����ݣ��Vȥvhv�ϵ��s������ݵ��x���ǣ����crffi��rff2�Q���ĞV�����r(sh��)�g����(sh��)��Ҋ�D2������(y��ng)�ܞVȥ���·�_�P(gu��n)�l�ʵ������ֲ���(hu��)��׃120hz�y����������60hz��늹�늕r(sh��)vhv�����еļy��������
6.3.3������Ƶ�ģ�M�·
ixms150�Ѓɂ�(g��)��ͬ��ͨ����ÿһͨ����ģ�M�· |