�Æ�Ƭ�C���F(xi��n)���M늄әC���l�����ԵĜy��
�����A ������ �������I�C늌��ƌWУ150076��
1����
���M늄әC�ľ��l�����Ƿ�ӳ���M늄әC�ӑB(t��i)���Եġ������M늄әC���β��\�Еr����****���Sؓ�d��tq��
ʽ��tjmax����****�o�B(t��i)�D��
��bc���������
��늻��ȱ�ʾ����Ǖr����bc=2��/n���t****���Sؓ�d�ɱ�ʾ�飺
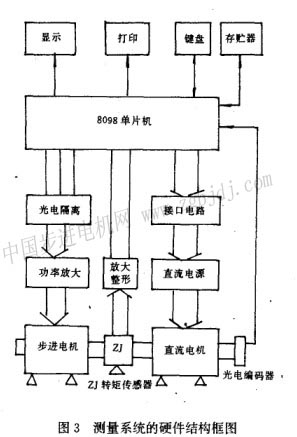
�S��ݔ���}�_�l�������ӣ�늙C�D�������ߕr���Ϳ��Կ������M늄әC������ؓ�d�D��ֵ�����½����@����늙C�D�ӕr���l(f��)�����D�����S���}�_�l�ʵ����߶��p�١�늙C�D�ӕr�a�����D�؞�ӑB(t��i)�D�أ��ӑB(t��i)�D���c�Դ�}�_�l�ʵ��Pϵ�Q�鲽�M늄әC�\�Еr���D��һ�l�����ԣ����Q�\�о��l���ԣ���D1��ʾ������һ�l�½���������
늙C�ľ��l������������l���Ժ͠������l���ԡ�������l����ָ���Dz��M늄әC�ں㶨�l���}�_������늙C����ͬ���r�����M늄әC��****�㶨ؓ�d�D���c�l��֮�g���Pϵ���y���r���Ƚo���M늄әCʩ��һ�㶨��ؓ�d�D�أ�Ȼ����һ���㶨�l�ʵ��}�_��늙C�����늙C�ܺ����}�_ͬ���\�ж��]�ЁGʧ�}�_���Ǵ��l���}�_�܌�ԓؓ�d����ͬ������(j��ng)�^���ɿ��@�ӵ�ԇ��Ժ��ҵ��܉�����ͬ����****ؓ�d�D�أ����D�ؼ���ԓ���}�_�l���µĠ����D�ء���׃���}�_���l�ʣ��؏����ϵIJ��E�ֿ��Եõ���һ�����D�ء��@�Ӷ�θ�׃���}�_���l�ʣ��Ϳ��Եõ������D���c�l��֮�g���Pϵ�������Ӿ��l���ԣ���D2��ʾ���������l����ָ���Dz��M늄әC�ں����\�Еr���G�����c���}�_ͬ�����l(f��)����****�D���c���}�_�l��֮�g���Pϵ���y���r����ʹ���M늄әCƽ��(w��n)�\���ڽo���}�_�l���ϣ�Ȼ����u����ؓ�d�D�أ���늙C��Ҫʧȥͬ���r���ɜy���˕r늙C��****ؓ�d�D�أ��@���D�ؼ���ԓ���}�_�l���µĠ����D�ء���׃���}�_���l�ʣ��؏��������E�����Ԝy�à����D���c���}�_�l��֮�g���Pϵ�����������l���ԡ�
2�y��ϵ�y(t��ng)��Ӳ���Y��
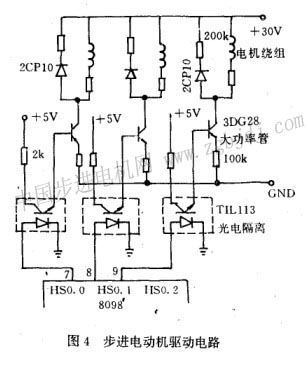
�y��ϵ�y(t��ng)��Ӳ���Y����D��D3��ʾ��
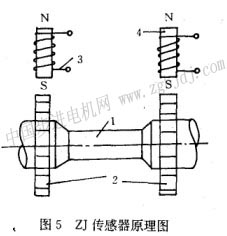
����ϵ�y(t��ng)�֞����֡�8098��Ƭ�C���֣����M늄әC�Ӻ�ֱ��늄әC���Ʋ��֣��D�ؙz�y���D�ǜy�����֡��C������Ҫ���@ʾ�·���I�P�·�����A���·�ʹ�ӡ�C�ȽM�ɡ��Á��@ʾ�\�Р�r�͜y���Y������ӡ���Ρ��I�����P����(sh��)�Լ�ϵ�y(t��ng)���Ƶȡ����M늄әC�����·��D4��ʾ����ܛ���Ŀ����£���8098��Ƭ�C�ĸ���ݔ��ͨ��hso.0��hso.1��hso.2ݔ���}�_����ͨ�^��������til113���ƴ��ʹ�3dg28�Č�ͨ�c��ֹ�����F(xi��n)���M늄әC�@�M��ͨ��c��늣��_�����MĿ�ġ���늸��x�������nj�Ӌ��C���ֺʹ��ʲ��ָ��x�_���Է�ֹ����̖�Z��Ӌ��C���֣���ɲ����еĹ��ϡ�
ֱ��늄әC�Ŀ�������8098��Ƭ�C�ĸ���ݔ��ͨ��hso.3��hso��4��(j��ng)��늸��x��С����ֱ���^����cֱ��늄әC��늘��@�M�ͼ����@�M�ӣ�����늘к��{��(ji��)������������Ա��C���M늄әCؓ�d���{��(ji��)��ͨ�ࡣ
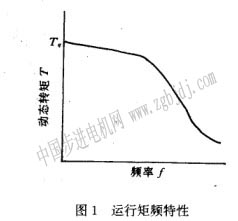
�D�صĜy����ͨ�^zj���D���������F(xi��n)�ġ�zj��������ԭ��D��D5��ʾ�����g��һ�����S1����ɶ˰��b�Ѓɂ���ͬ�X��(sh��)���X݆2��ÿ���X݆����ȸ����bһ�K���4������ς��@����̖��Ȧ3�����D�S���D�r�����ڴ���c�X݆�g�Ě�϶�Ō��S���X��λ�õ�׃�����l(f��)�������Ե�׃����ʹ���^��̖��Ȧ�Ĵ�ͨ�fҲ�l(f��)�������Ե�׃������������̖��Ȧ�зքe�Б���늄ݣ�������D�ؕr�������S��һ��������һ�ˮa��ƫ�D���գ�a�c����D�س����ȡ��ڃɂ���̖��Ȧ�иБ�늄ݵ���λ���Ҳ�S�D�ص�׃�����l(f��)��������׃�����ɂ���Ȧ�еĸБ�늄ݞ�u1��u2��