���മ��늙C�D�ٵ����Ϳ���ϵ�y
������ �� Ρ ������ (����������W710048)
�� �� � �� (86509����g��)
1����
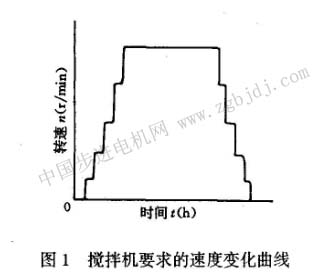
ij���a�Cе��Ҫ����Һ߅�ӟ�߅���裬һ�μӹ����ڞ锵С�r��Ҫ���D����200��1 200r/min�������B�m���{����һ�����ڃ��ٶ�׃��ϣ�����D1��ʾ�����M�У��D�ٷ��B�`����ڽo��ֵ�İٷ�֮5��
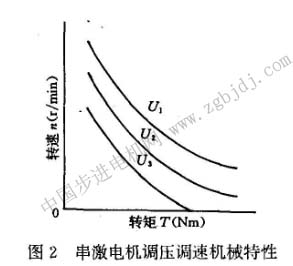
ԭ����d-40-ii��늄Ӕ���C�����چ��}�ǣ���Ҫ���F�D1��ʾ�ٶ�����������˹��քӲ����M�мӜp�ٿ��ơ������_�����B�m�����ķ����ٶ��Ժ��ٶȅs�������ӣ��Еr���Ԅ�ͣ�����Еr�֕����w܇�������^****���S�ٶȌ���Һ�������o�����C�ӹ��|��������������˲����ˆT�ڄӏ��ȡ�����ԭ�����@�N����C���õ��džΙC����ʽ늄әC������׃늿����_�h�{�ٷ�ʽ������늙C���{���{�ٕr�ęCе������D2��ʾ��
�Cе���Ժ�ܛ���ٶȺ�������ؓ�d׃�����ӟ����Һճ�ȵ�׃���ȣ����Դ늉����ӵȵ�Ӱ푣����Ҫ���F�������{�٣��@�N늙C�����_�h���{�ٷ�ʽ���Dz����ܵģ���횲��÷������ơ����@�N늙C�D������c���������ͬһ��������ͨ�c������Pϵ߀�����M��Ǿ��ԅ^���ټ�����Һ�c�ضȵ��Pϵ�Iʹϵ�y���ڶ�N�Ǿ����c�r׃�����c����˲����Խ��������Փ����A��pid���Ʒ�ʽ���y�@�úõ�Ч�����Ԡ�B׃����������A�ĬF�����������Խ�Q�Ǿ��ԡ��r׃�Ȇ��}�������ڿ��ƌ�������늙C����Һ�������Ŀ����^��׃���࣬��׃��֮�g߀�н�����ϡ��Ǿ��ԵĴ��ڣ����y�ҵ����_�Ĕ��Wģ�ͣ�����Կ��ƌ���Ĕ��Wģ���Լ��o��������ָ�˞���Aȥ�x���m���Ŀ���Ҏ���@һ���������Փ��F��������Փ�OӋ����ϵ�y���^��ͬ�ӟo�����F�����������ܿ��Ʒ�����ģ�����Ƅt���^�m���@�Nϵ�y����������һ�N�Ǿ��Կ��ƣ��Ҳ���һ��Ҫ����ƌ��_�Ĕ��Wģ�ͣ�����һЩ�����ƾ��ȺͿ�����Ҫ��̫�ߵĈ��ϣ�ģ�������Ǻ��m�ġ�
2 ����늄әC�D��ģ������ԭ��
ģ������ͬ������ѭ��������˼��ģ����Ŀ���Ҏ�t�������Z�Լ�����������һϵ�Ў���ģ���Եėl���Z��M�ɣ����猦���ƌ���Ġ�B�Ƿ�����A��Ч�����������Ƿ���ƫ�����ƫ�����ƫ��С��������ƫ�����ؓƫ���ģ���Z�������������@Щģ�������˵�ƫ��ֵ���������������˵Ĵ��X��ģ���������M�ЛQ�ߣ�ݔ����һ���m����ģ��������ȥ�m�����ƌ�����F��ƫ��@�N���ƌ���Ӌ��C���ֿ��Ƶ�һ�N��ʽ��ģ�����������H����һ�_��Ӌ��C��
����늙C�D�ٵ�ģ�����ƣ����ö��S�Ć�ݔ���ݔ����ģ����������ݔ����D�ٵ��`��D���`���׃���ʣ�ݔ��׃���{������늙C��늉���һ��ģ�����Ƶ��㷨�^���ǣ��C�Д���ë@ȡ늙C�D�ٺ��D��׃���ʣ����D���c�o��ֵ�M�б��^���õ��D���`��e���D��׃����ce���@�ɂ�������ģ����������ݔ��������ģ��������׃�ɿ���ģ���Z�Ա�ʾ��ģ����������ģ�������Pϵ��Ҏ�t�����������ϳɣ��M��ģ���Q�ߣ��õ�ģ������ݔ��׃��u�����u�D�Q�ɾ��_��������ģ�D�Q��ģ�M��늉���ȥ�{������늙C��늉����Ԝp���D���`��@������ˌ�����늙C�D�ٵ�һ��ģ�����ƣ�Ȼ���Д�ȴ��ڶ��βɘӡ��M�еڶ������ơ������@��ѭ�h��ȥ��ֱ�������D�ٵ�ƫ�
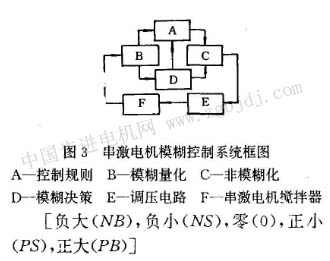
��ԭ�����ƿ�D��D3��ʾ��
�ڱ�ϵ�y�У��D��ƫ��ݔ��׃��e���D��ƫ��׃����ݔ��׃��ce��ݔ������׃��y���Z��ֵ��ģ���Ӽ��飺
�D��ƫ��e��Փ���x���D��ƫ��׃����ce��Փ���x��ݔ��������y��Փ��飬�������С������5���ȼ����քe�飺
-3, -1, 0�� +1�� +3
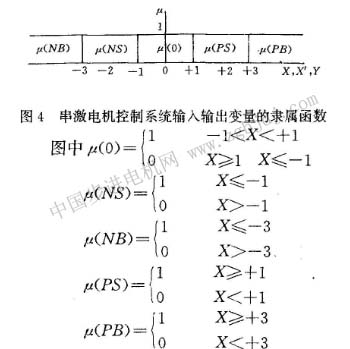
�x���Z��׃�����`�ٺ�����������ηֲ�����D4��ʾ��
����ģ������Ҏ�t�M�ЛQ�ߣ��������Pϵ��������ģ�����Ơ�B����Ҋ��1����
|