���M늙C�\�о��ȷ����������·�ĺ���ʹ��
�T־�A���Ї��ƌW(xu��)���g(sh��)��W(xu��)�Ϸ�230026��
l ����
���M늙C�ܷ�����M���ٶ��c�Ƕȿ��ƣ�ʹ���ڬF(xi��n)���Ԅӿ��Ʒ���ռ��Խ��Խ��Ҫ�ĵ�λ����ʹ���_�h(hu��n)��B(t��i)�£���Ҳ�܌��F(xi��n)�^�߾��ȵ�λ�ÿ��ơ�Ȼ�������M늙C��ʹ�Õr����ɿؽ����Բ����λ�ģ�Ҳ�����f���Ƕ������Sʽ׃���ģ����������ܵ��ӹ���ˇ��Ӱ푣�һ�����Lһ����1�����ң�ÿ�����LҲ������ȫ��ȣ�����ھ���Ҫ���^�ߵĈ��ϣ���Ҫ���M늙C�D(zhu��n)���`����һ�����J�R���Լ���ȡ����(y��ng)����߾��ȵĴ�ʩ��
2�`��ķ��
�ڲ��M늙C��ʹ���У����a(ch��n)�����D(zhu��n)���`����ԷֳɃɴ��һ��c���M늙Cֱ�����P(gu��n)��������һ��H�c���M늙C�������P(gu��n)��߀�c�(q��)�ӷ�ʽ���P(gu��n)��
2.1���e���`��
���e���`��Ҳ���o�B(t��i)������`�ָ�ڿ��d�l���£����M늙C�Č��H�\�нǶ��c��Փ�\�нǶ�֮�g�IJ�e�����˷������㣬�ڲ��e���`���в����]Ħ������Ӱ푣����c�(q��)�����Ҳ�]���κ��P(gu��n)ϵ������һ���|(zh��)���^�ߵ�늙C���@���`��һ����57���ҡ�
��ͬ���M늙C�IJ��e���`��Ҳ�Dz�ͬ�ġ�����һ���ض���늙C���ԣ��䲻�e���`��һ���ǹ̶��ġ�ԭ���Ͽ���ͨ�^�A(y��)�Ȝy���@Щ�`�Ȼ��ͨ�^һ�����a��������߾��ȡ������H�ϣ���횕r��֪�����M늙C�Ĵ_���\��λ�ã�Ҳ�����\�е���һ��������Ҫ�õ��@����Ϣ���Ѓɂ��ֶΣ�һ��ͨ�^����λ�Â������y֪�@��λ�ã�һ���O(sh��)��һӛ���·���ܕr��ӛס���M늙C��λ�á�Ȼ���@�����ĽY(ji��)�����������·�ď�(f��)�s�ԡ�
���ڼӹ��ϵ�ԭ���M늙C���\�����ĕr�֮�g�ĽǶ��g���`����^С��ֵ�������Ҫ���^�߲��ྫ�ȵĕr���Կ��]���������\�з�ʽ��
���M늙C�����D(zhu��n)�\�Еr�䲻�e���`����Փ�����h���㣬����ڸ߾����(q��)���У����Կ��]�������D(zhu��n)�\�з������˕r��ʧ�{(di��o)���`�����`����****���`��Դ��
2.2ʧ�{(di��o)���`��
ʧ�{(di��o)���`��Ҳ��ؓ�d���`�ָ���M늙C���(q��)��ؓ�d�ėl���£����ˮa(ch��n)��һ����ؓ�d���أ����M늙C��a(ch��n)��һ��ʧ�{(di��o)�Ǧȡ�����(j��)��ՓӋ�㣬����һ������Ǟ�1.5�ȵ����ಽ�M늙C������ؓ�d���ض�������ĽǶ�׃���飺
��Ҋ�����˵õ��^�ߵľ��ȣ��t����(q��)���^�͵�ؓ�d��
2.3���`��
������ڲ��M늙C�ϵ�ؓ�d���ظ�׃���t���a(ch��n)����ʧ�{(di��o)���cԭ�����෴����ˣ���ʹؓ�d����****�㶨������Ħ�������������O(sh��)늙C�o�κβ��e���`���ô����늙C���ܵ������������\�У�Ҳ���a(ch��n)��һ���ஔ��ĽǶ��`�
�����������`�����߾��ȣ������(q��)�ӕr���ɶ��\��һ���IJ���(sh��)��Ȼ�أ�ʹؓ�d���ر���һ������
2.4�؏�(f��)�`��
��ؓ�d****�㶨�ėl���£����M늙C��ԭ���\�ӷ���ķ������\�D(zhu��n)��������ǰ�M�в���������ʼλ���c�Kֹλ���в�e���@���`��ā�Դ���^��(f��)�s��_���ڎ���֮��(n��i)������ֵ���0. 0014������ˣ��ڴ����(sh��)�������ǿ��Ժ��Բ�Ӌ�ġ�
3ͨ늠�B(t��i)���`���Ӱ�
����ͨ늠�B(t��i)���p�ࣨ���ࣩͨ늠�B(t��i)�ľ���Ҫ��һЩ���@��Ҫ�����ڶ���ͨ늕r���d����nj��c�����@�M�е���������P(gu��n)����׃ÿһ������Ĵ�С����Ӱ푵�����Ǿ��ȡ��ڟo��(w��n)���·����r�£��@��׃���п������ஔ��ġ�
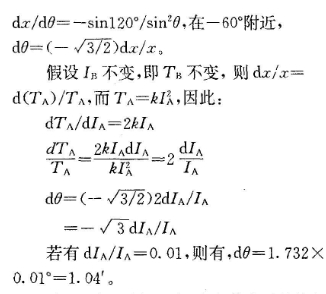
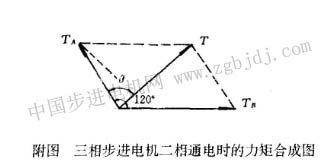
�����ಽ�M늙C���������D�У��O(sh��)��a��b����ͨ����a(ch��n)�������طքe��ta��tu���t�У�
Ȼ�������چ���ͨ늣���ؓ�d�������r�£��D(zhu��n)�ӵĶ�λλ���c����Ĵ�С�o�P(gu��n)��
4����������`��
���M늙C�IJ����һ����1�����ң��Еr��Ҫ���@��ֵС�ö�IJ���ǣ��ɲ��ü��ּ��g(sh��)�����ü��ּ��g(sh��)ֻ����߲��M늙C�ķֱ��ʣ����]������侫�ȡ�
����һ����(q��)���·�����ֺ�߀������һЩ�`��@Щ |