�ŷ�늄әC���^�����ƿ����·
�� �� (���B�F���W(xu��)Ժ116022)
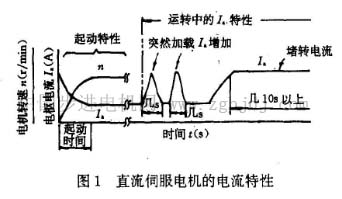
ֱ���ŷ�늄әC�����r��(j��ng)�������^����a(ch��n)�����ܮa(ch��n)���^�����Ҫ�����N����늙C���ӕr����ͻȻ��ؓ�d�r����늄әC���D(zhu��n)�r�����Т��c�ڃɷN���^���Ǟ���ʹ늄әC�a(ch��n)����Ҫ���D(zhu��n)�أ����m(x��)�r�gһ���ڎ����ԃ�(n��i)����������늙C�������������^�����ڢ۷Nһ����m(x��)�r�g�ڎ�ʮ�����ϣ�����֮������늄әC���@�M�����������ٹ����^�������N�^�������������D1��ʾ��
1 һ�����������·
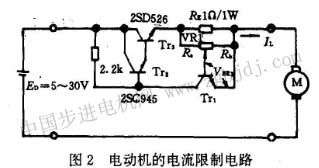
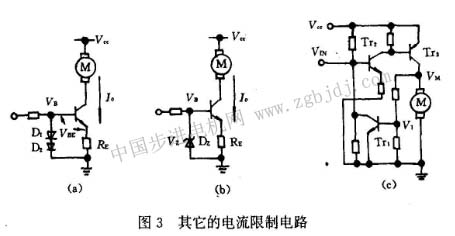
���^��������·�����ǟoՓؓ�d���кηN���ԣ���������늘������һ��������(n��i)��һ���O(sh��)���ڷ�(w��n)�B(t��i)������~���D(zhu��n)�أ��~��ؓ�d���r��2��λ�ã����õ�늄әC��������·��D2���D3��ʾ���D2���H����һ���������h(hu��n)��(ji��)�Ĵ�(li��n)��늉��{(di��o)���·��ؓ�d���  re���^���z�y��裬re��vr1�ܛQ������ֵ���D3�������N��������·���D3a��vb�ã�vfl +vf2�����ƣ�vf1��vf2�քe��d1��d2�������D3b��vh�÷�(w��n)�����O�ܵķ�(w��n)��ֵvz���ơ��D3c�����ƹ��o늄әC�����늉�vm��v1�����Ҏ(gu��)��ֵ���ϣ�trl��(d��o)ͨ��tr2�P(gu��n)�ࡣ
�����ĎN��������·��һ����ͬ�Ć��}��늙C���ӕr�r�g����(sh��)׃�������r�g׃����λ�ÿ��Ƶ�ֱ���ŷ�늄әC��ʹ�ÕrҪ�����ӕr�g�̡�����@Щ���������·���m���ŷ�ֱ��늄әC��λ�ÿ��ơ�
2��Ӱ푼��������r�g����������
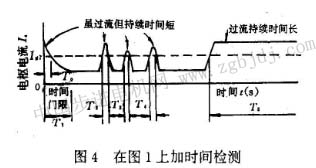
늙C���Ӻ�ͻ��ؓ�d�a(ch��n)�����^�������ڹ����^������늙C���D(zhu��n)�^�����ڹ����^�����@�N�^���ij��m(x��)�r�g�L�����˸���늄әC���������ܣ���Ӱ푼��������r�g�����������ƹ����^�����ɲ��þ����^���r�g�z�y�����������·���·���O(sh��)Ӌ˼·���ÈD4���f����
�·�O(sh��)���˶����z�y����(sh��)��һ�����^������ֵia1,��һ�����^�����m(x��)�r�gֵt1����(d��ng)�����·�z�y���^���r�g���^t1�r�������·�ń������@�ӵ������·���܌��F(xi��n)��늙C���Ӻ�ͻ��ؓ�d�r�����������^�����m(x��)�r�gtot1�r���^���·�������Д������ؓ�d������@�Ӽ������˹����^�����ֲ�Ӱ����ӵĿ����ԣ���һ�Nʮ��������^�����o�·��
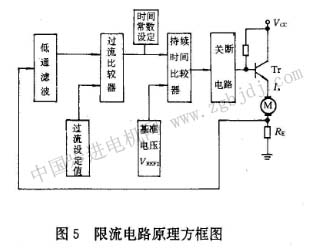
�^�����ƿ����·��ԭ������DҊ�D5.
�·��Ҫ��늙C����z�y�͵�ͨ�V���·���^���O(sh��)��ֵ�·���^�����^���·���r�g����(sh��)�O(sh��)���·�����m(x��)�r�g�z�y���^���·�����m(x��)�r�g���^��������fvref2���P(gu��n)���·�ȽM�ɡ�늙C�����re���z�y����ͨ�V���·�ǰ�re�ϵļy��늉��V�����^�����^�����Д�ؓ�d����Ƿ��^���Sֵ�����m(x��)�r�g���^�����Д��^���ij��m(x��)�r�g�Ƿ��^���Sֵ���@���·�����Д��Ƿ��^���������^�����Д��^�����m(x��)�r�g������@���·Ҫ�O(sh��)����������ֵ��
3�^�����ƿ��ƵČ����·
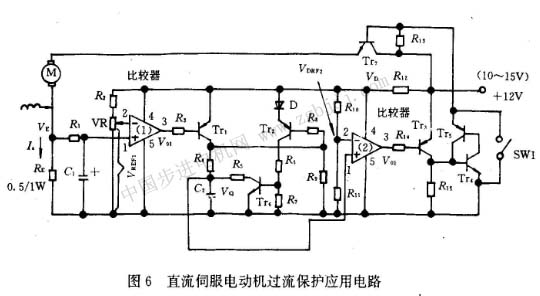
�����^�����ƿ��ƵČ��H��(y��ng)���·��D6��ʾ��
3.1�^�����^���Ĺ���ԭ��
�ڈD6�У�늙C������əz�y���re׃�Q��늉�ve����(j��ng)��ͨ�V����r1��c1�ӵ�������^��(1)��ͬ��ݔ��ˡ����^��(l)�ķ���������rz���λ��vr�։��õ�һ������늉�vrefl����׃vr�����S�^��λ�þͿ��Ը�׃vref1��Ҳ���Ǹ�׃��������Ƶ��T��ֵia1����������r�£�veС��vref1��ve=iare�����^����ݔ��v01����ƽ�����O��trl��ֹ����ia>ial��ve>vrefl�����^����ݔ��v-01����ƽ��trl��(d��o)ͨ���ͳ��^����̖��trl����(d��o)ͨ��ʾ�o�^����
3��2�r�g����(sh��)���O(sh��)���· |