���ʽֱ�����M늙C�������·�Č��F
���t�d(���K������W悽�212013)
��ժ Ҫ����B����mcs_51��Ƭ�C���F�����ʽֱ�����M늙C�ļ����ӣ����ò���γ�
���ҡ�������̖�����F�����·��ֱ�����M늙C���ٶȿ��ơ�
l �� ��
ֱ�����M늄әC��һ�Nֱ�������\�ӵ�늴ň���Ԫ������һ�N��ݔ���}�_�D�Q�ɲ��Mֱ���\�ӵęC��b�á����������_�h�l���£���ֱ���ṩ���_�ɿ���ֱ��λ�ơ��ٶȺͼ��ٶȿ��ƣ������o�B�̈́ӑB��λ��Ŀǰ���ڔ��ؙCе��Ӌ��C���O�Ⱦ����ӡ����ܿ����I��õ��V���đ��á�
ֱ�����M늙C�Ķ�λ������һ��ʮ����������܅�����ֱ�����M늙C������һ����}�_��̖�����ƺ��ӣ�������һ����}�_��̖����λ�ֱ��ʱ��^�ͣ����ֱ�����M늄әC��Ҫ���ü����·��߶�λ�ֱ��ʡ�
2ֱ�����M늙C�Ŀ���ϵ�y
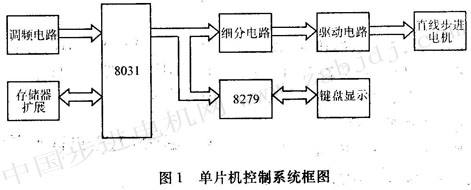
���OӋ�ĘәC�Ƕ�����ʽֱ�����M늄әC�����@�Ma��b�քeͨ�^���ҡ�������������M늄әC���������\�С���������ϵ�y�ɷֳ��{�l�·�������·�����·���I�P�@ʾ�·���惦���Uչ�·�Ȳ��֣���D1��ʾ��
�������ʽֱ�����M늙C�Ŀ������c��Ҫ���·�M������Ҫ��
a���Ɇ�Ƭ�C�γ��l�ʿ��{����ֵ���{�����Һ�������̖��
b���l�ʷ�����0��6��300hz��
c���ڼ��ֶ����S�ėl���£���߶�λ���ȡ�
3�����·��Ӳ���OӋ
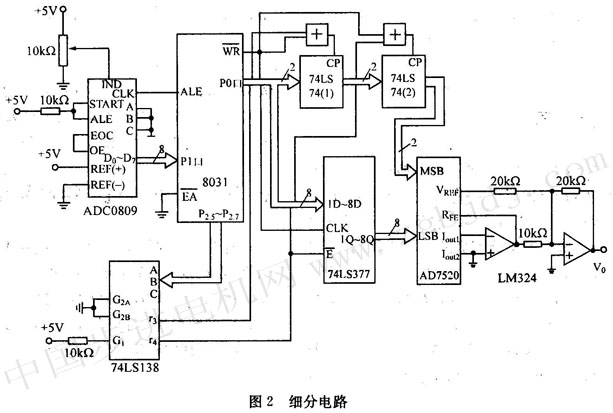
����B�ļ����·�����Æ�Ƭ�Ci��d��ÿ��һ���r�gݔ����ͬ�Ĕ�������ԓ�������քe�������r�̵����Һ���ֵ�����Һ���ֵ����d��a�D�Q�͵õ����Һ�������̖�������ɂ��������ƽ�������������̖�����ľ��_��ȡ�Q������������̖�ļ��ֶȺ�d��a�D�Q���ķֱ��ʡ����x��ļ��ֶȞ�100��d��a�D�Q���ķֱ��ʞ�10λ��Ӳ���D��D2��ʾ��
�D�ЃH����һ��ݔ������һ��ݔ��Ӳ���D������ͬ������10λd��a�D�Q��ad7520�����i��������8031���ö��β���ݔ��10λ�������Ȍ���2λ����ݔ��74ls74(1)�������ѵ�8λ����ݔ����74ls377��ͬ�r��74ils74(1)�ă��݂��͵�74ls74(2)���Ķ����F8031ݔ��10λ����ͬ�r�_��ad7520�Ĕ���ݔ�뾀��ͨ�^��׃ad7520�ą���늉�vref���ɸ�׃����������̖�ķ�ֵ��
�����ܸ�׃ֱ�����M늙C���ٶȣ����ݔ�������ҡ�������̖��һ�N�l�ʿ��{����̖������adc0809��ģ�M���D�Q�ɔ�����������8031���r��o�ĕr�g�������O8031���r��0���ù�����ʽ0���t�r�g������13λ����5λ�̶�����8λ����adc0809�D�Q�Ĕ�������ͨ�^��׃ai)c0809��ݔ��ģ�M������׃adc0809ݔ���Ĕ��������Ķ���׃�˶��r�r�g�������_����׃���ҡ�������̖�l�ʵ�Ŀ�ġ�
4�����·��ܛ���OӋ
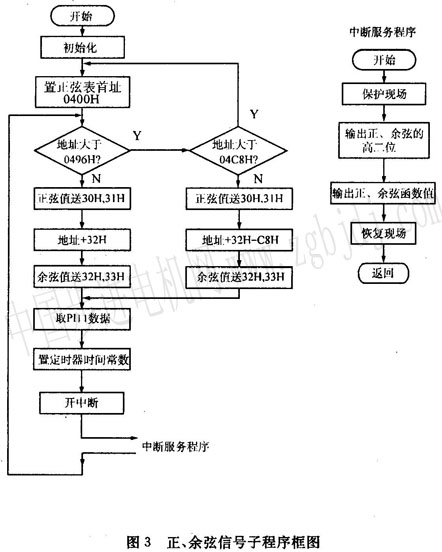
���˹�ʡcpu�r�g�������ҡ�������̖�Ĕ����������Dz��ü��rӋ��ķ����_������
���A�Ƚ��^Ӌ�㣬�γ�һ�����Һ�����������چ�Ƭ�C�Ĵ惦���У�ͨ�^����γ����Ҳ������Ҳ����γ�ֻ���ڲ��r���90o��
һ�㣬�������ҡ�������̖�ıƽ������ֶȺ�d��a�D�Q���ֱ���Խ�ߣ���λ���Ⱦ�Խ�ߡ������ֶ�Խ�ߣ�Ҫ���Ƭ�C�ٶ�Խ�죬��d��a�D�Q���ķֱ���Ҳ�ܵ��r��͆�Ƭ�C�ٶȵ�Ӱ푣������әC�Ŀ������c���x�ֶȞ�100��d��a�D�Q���ֱ��ʞ�10λ��
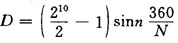
�����ֶ�n=100�������Ҳ�һ�����ڷ֞�100�ȷݣ��tӋ��ijһ����ֵ�Ĺ�ʽ�飺
ʽ�� d����ijһ���Һ���ֵ
n�������ֶ�
n����ȡ0��100
����ֵ�D�Q��16�M�Ɣ�������ƫ�ƴa������ijһ���Һ����Ĕ������������p�O�Ե�10λd��a�D�Q����ƫ�ƴa��0200h������ֵad7520�p�O��ݔ������������ҡ�������̖�ӳ����D��D3��ʾ��
5�YՓ
a�����Y�����������ò����ʽ����Ƭ�C�ܮa���l�ʿ��{����ֵ���{������������̖������،��F�����Ӽ�ֱ�����M늙C���ٶȿ��ơ�
b�����ڲ����^�߷ֱ��ʵļ����·��ʹֱ�����M늄әC��λ���ȵõ���ߣ��әC�Ķ�λ�����_o |