����ģ���������ŷ�ϵ�y(t��ng)���{(di��o)�����g(sh��)
���~�� ������ �����A �ؑ�(�A��������W(xu��)��h430074)
��ժ Ҫ���ŷ�ϵ�y(t��ng)ģ�����{(di��o)����������ģʽ���ģ�����������������R(sh��)�ȼ��g(sh��)�Y(ji��)������(l��i)����(du��)��ؓ(f��)�d�D(zhu��n)��(d��ng)�T����׃���Լ��C(j��)е���(d��ng)�ȣ���(j��ng)�^(gu��)10��ε��{(di��o)�������Ԍ��ŷ�ϵ�y(t��ng)�ٶȿ������������Ԅ�(d��ng)�{(di��o)��(ji��)�����^�M�⡣��(sh��)�(y��n)�C����ԓ���g(sh��)��������Ч�ġ�
1�� ��
������Ӽ��g(sh��)����Ӽ��g(sh��)�İl(f��)չ�����M(j��n)���ŷ�ϵ�y(t��ng)�ڹ��I(y��)�еđ�(y��ng)�á�Ȼ���ڌ�(sh��)�H��(y��ng)���^(gu��)���У��������C(j��)е���r�l(f��)��׃���r(sh��)Ҫ����(y��ng)�{(di��o)������������(sh��)�@һ��(w��n)�}������ʹϵ�y(t��ng)�܉�͙C(j��)еؓ(f��)�d���^�õ���ϣ�����Ҫ�˞���M(j��n)���{(di��o)�����@Ҫ����Ќ��T(m��n)��֪�R(sh��)����ˣ��đ�(y��ng)�õĽǶȳ��l(f��)����(sh��)�F(xi��n)�ŷ�ϵ�y(t��ng)�ą���(sh��)�Ԅ�(d��ng)�{(di��o)�������nj�(sh��)�H��(y��ng)�õ�������Ҫ��Ҳ���ŷ�ϵ�y(t��ng)�����ܻ��l(f��)չ��څ��(sh��)��
Ŀǰ�Ԅ�(d��ng)�{(di��o)�����g(sh��)��Ҫ�֞���һ�ǻ���ģ�͵��{(di��o)�����g(sh��)�����ǻ���֪�R(sh��)���{(di��o)�����g(sh��)������ģ�͵����{(di��o)�����g(sh��)��Ҫ�������Ĝy(c��)ԇ��̖(h��o)��Ȼ�����(j��)ϵ�y(t��ng)��ģ�ͽY(ji��)��(g��u)���R(sh��)�l(f��)��׃���ą���(sh��)���@�N������(du��)��̖(h��o)�ľ�����һ����Ҫ��������(y��ng)��Ӌ(j��)����Ҳ�^��һ��Ҫ�����\(y��n)���ٶ��^���̎����������֪�R(sh��)�����{(di��o)�����g(sh��)���Ǹ���(j��)�A(y��)�ȴ_���õČ�(sh��)�H��(j��ng)�(y��n)Ҏ(gu��)�t�͌�(sh��)�r(sh��)��ȡ��ϵ�y(t��ng)�������_���������ą���(sh��)���@�N��������Ҫ�������Ĝy(c��)ԇ��̖(h��o)����ֻ��ϵ�y(t��ng)ݔ��ݔ����̖(h��o)����ˌ�(du��)��̖(h��o)��Ҫ�ߣ�����(du��)Ҏ(gu��)�t֪�R(sh��)Ҫ����^�ߣ�ͨ����Ҫ�����ľ��_�Č�(sh��)�H�{(di��o)��Ҏ(gu��)�t֪�R(sh��)����ˌ�(du��)�{(di��o)����(sh��)�Ŀ��Ŷ���Ҫ����(f��)�(y��n)�C��
���ďČ�(sh��)�H��(y��ng)�õĽǶȳ��l(f��)�������һ�N��(ji��n)�ο��еą���(sh��)ģ�����{(di��o)��������ԓ���g(sh��)����Ӌ(j��)����С������(sh��)�F(xi��n)�����c(di��n)����(du��)��׃����ؓ(f��)�d����(j��ng)�^(gu��)10����{(di��o)�����Ԍ��������������{(di��o)�������^�M�⣬�^�õ������׃����r������һ���̎�������Ɍ�(sh��)�F(xi��n)�@һ���Ʒ�������(sh��)�(y��n)�Y(ji��)���C��(sh��)ԓ�����ǿ��еġ�
2ϵ�y(t��ng)�Y(ji��)��(g��u)���Ԅ�(d��ng)�{(di��o)��ԭ��
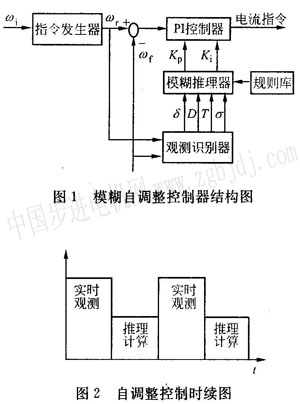
�D1ʾ����ģ�����{(di��o)���������ĽY(ji��)��(g��u)��D�����п������Ƀɲ��ֽM�ɣ������������{(di��o)���C(j��)��(g��u)�����������֞��ٶ��{(di��o)��(ji��)��������pi��ʽ��������ģ�����{(di��o)�����������������ٶ�ָ��l(f��)�������^�y(c��)����ģ�����������ٶ�ָ��l(f��)�����Ǟ��˷�ֹ�ٶ�푑�(y��ng)�a(ch��n)���^(gu��)��ě_�����O(sh��)�õ�ָ��_�C(j��)��(g��u)���^�y(c��)��ͨ�^(gu��)�ɘӌ�(sh��)�r(sh��)��푑�(y��ng)���Σ����г�ȡ����ֵ�糬�{(di��o)�����������ӵȣ�����(du��)�@Щ׃���M(j��n)��Ҏ(gu��)��̎����ģ����̎�팢ݔ�뵽ģ��������������׃���D(zhu��n)�Q�����Z(y��)�Է�̖(h��o)��ʾ�ĺ��m���Z(y��)��ֵ������(j��)ģ��������������_��푑�(y��ng)���Ե�ģʽ�������������A(y��)�õ�ģ��Ҏ(gu��)�t���_���ŷ�ϵ�y(t��ng)���ٶȿ�����������{(di��o)����Ϣ��ģ����������ݔ���Y(ji��)����pi����(sh��)���{(di��o)�����ӣ�����{(di��o)�����ӵ�ֵ����1���µĿ���������(sh��)��Ҫ���ӣ����С��1���t�µĿ���������(sh��)��Ҫ�pС��
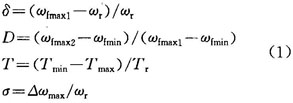
ģ���{(di��o)�����Ƶĕr(sh��)�m(x��)��D2��ʾ�����֞�ɂ�(g��)�A�Σ���(sh��)�r(sh��)�^�y(c��)�A�κ�����Ӌ(j��)���A�Ρ�
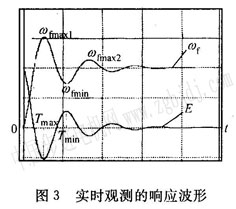
�D3ʾ���ˌ�(sh��)�r(sh��)�^�y(c��)�A�����ɘӵ�푑�(y��ng)���Σ�e�ǽo��ָ���r�ͷ�����f֮�g��ƫ���ģ�����{(di��o)���������õ����������x���£�
tr���ٶ�ָ�������ٕr(sh��)�g������max���ٶȷ�(w��n)���\(y��n)�Еr(sh��)��****����(d��ng)ֵ��
��ʽ�У����dz��{(di��o)����d���������ӣ�t��Ҏ(gu��)����ʎ���ڣ���������푑�(y��ng)�Ŀ����������ٶȲ���(d��ng)�ʣ�����ӳ��ϵ�y(t��ng)푑�(y��ng)�ķ�(w��n)�B(t��i)���ԡ����˜�(zh��n)�_���^�y(c��)������������������Ҫʹ�^�y(c��)���ڱȌ�(sh��)�H���ŷ�����푑�(y��ng)����Ҫ�L(zh��ng)��
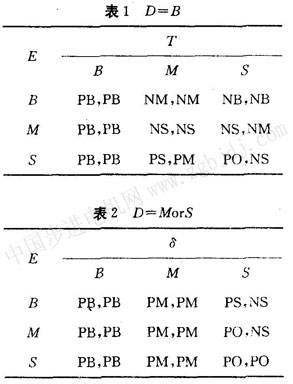
������Ӌ(j��)���A�Σ���(d��ng)�IJɘ��^�y(c��)�Ĕ�(sh��)��(j��)�г�ȡ������ֵݔ�뵽ģ������������Ҫ��(du��)�@Щ׃���M(j��n)��ģ�����������ڱ�ʾ����ģ��׃���`�ٶȺ���(sh��)��ģ�����ϰ���s��m��b����(du��)���@�Ă�(g��)����׃�����`�ٶȺ���(sh��)����һ�µġ�ģ����������ݔ���Y(ji��)�����ٶ�pi�{(di��o)��(ji��)����������ͷe�����������ֵ��cp�͡�ci���@�ɂ�(g��)׃��������ͬ���`�ٶȺ���(sh��)��ͬ�ӵ��Z(y��)�Է�̖(h��o)nb��nm��ns��zo��ps��pm��pb������(j��)ģ��Ҏ(gu��)�t�_���ɂ�(g��)������һ��(g��)ģ���Q�߆�(w��n)�}���Q�߷�����Ҫ�����N��
1���߶ȷ���2����λֵ�ЛQ��3���ә�(qu��n)ƽ���ЛQ��
���˜p��Ӌ(j��)���������ø߶ȷ��_������������(sh��)������ֵ���t�{(di��o)������ٶȿ���������(sh��)�ɱ��_(d��)���£�
3ģ���������{(di��o)��Ҏ(gu��)�t
���˵õ���(zh��n)�_���挍(sh��)�ط�ӳ����ϵ�y(t��ng)�����ԵČ�(sh��)�r(sh��)�^�y(c��)���Σ���(y��ng)�M�����Cʹ�ŷ��(q��) |