�����ǙC�͔�(sh��)���D�Q���OӋ�c�`�����
�� ��
����ɽ�ƌW���g�WԺ�C늷�Ժ���V�|��ɽ528000��
ժҪ����B�������ǙC����(sh��)���D�Q��ԭ���c���ɣ��Լ������ǙC����(sh��)���D�Q���P�I���g�������˼�����̖�C��ʧ�桢������̖�c��̖֮�g�������������`�
�P�I�~�������ǙC����(sh��)���D�Q�����ŷ�ϵ�y(t��ng)i�`�����
�ЈD���̖��tm383.1 �īI���R�a��a ���¾�̖��1001-6848(2000)02-0006-02
1 �� ��
�����ǙC��Ŀǰ��_����ɿ����Sλģ�M������[1]���V�����ں��ա����졢�����ȸ��N����ϵ�y(t��ng)�������_������������׃�Q�����ڿ��ơ��C������ϵ�y(t��ng)�ȡ����y(t��ng)�ϣ������ǙCݔ����ģ�M��̖�ɲɘӱ����·��(j��ng)a��d�D�Q�ɔ�(sh��)����̖����Ӌ��C�·�M��̎��Ӌ��_���S��λ�ã��@�N�_�h(hu��n)ʽ�ęz�y̎��������ʹ������ϵ�y(t��ng)�ķֱ��ʡ�****���ȶ��dz��ͣ������Ǹ�ۙ�ٶȷdz��ͣ������o���M����ٸ߾��ȑ��È��ϡ����˽�Q�@�����}���������һ�N���ڶ��A�ŷ�ԭ���Ĕ�(sh��)���D�Q�·���@���·�������ǙCһ�����ں܌��Ĝضȡ���ȡ���Ӻ͛_���h(hu��n)��������������ʹ�����ǙC���Գ�ְl(f��)�]�������á�
2����ԭ��
2.1����ԭ��
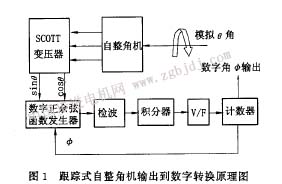
�����ǙC����(sh��)���D�Qԭ����DҊ�D1����Ҫ��scott׃���������ٔ�(sh��)�������ҳ˷���[2]���`��Ŵ���������z�����������e������������ʎ��������Ӌ��(sh��)����߉�����·�M�ɡ�
�O�����ǙCģ�M�S��λ�Þ�ڣ��t��ݔ����̖�飺
��(j��ng)scott׃�����D�Q�ɿڽ���������ʽݔ������
�OӋ��(sh��)����ʾ�Ĕ�(sh��)�ֽǣ���(j��ng)��(sh��)�������ҳ˷����ã�
����̖��(j��ng)�`��Ŵ������p���t�ã�
�@���`����̖��(j��ng)�����z�y���e������ݔ��늉�ȥ����vco�l�ʣ��Ķ���׃Ӌ��(sh��)����Ӌ��(sh��)�l�ʺ�Ӌ��(sh��)������������ϵ�y(t��ng)�Ƕ��A�]�h(hu��n)ϵ�y(t��ng)����Kʹ��sin(0-��)=0������=�գ����ģ�M�ǵ�ttl�ƽݔ����(sh��)�ֽǵ��D�Q��
2.2��(sh��)�Wģ��
�Dl��ʾ�����D�Qϵ�y(t��ng)�Ĕ�(sh��)�Wģ�Ϳ�����һ��������ͨ�����Ѓɂ��e�����ķ�������ϵ�y(t��ng)����ʾ��Ҋ�D2���@�(sh��)�������ҳ˷������`��Ŵ����������z������������ʎ���DZ����h(hu��n)��(ji��)���e�֭h(hu��n)��(ji��)i�Ǽ��˵�ͨ�a��?sh��)�ģ�M�e�������Է�ֹ�����·���ڸ��l�����������`���(w��n)������ϵ�y(t��ng)���e�֭h(hu��n)��(ji��)i��Ӌ��(sh��)�����ɡ�ϵ�y(t��ng)���f����(sh��)��
ʽ��k��ϵ�y(t��ng)���ٶȳ���(sh��)�����_�h(hu��n)���档t1=clr1��t2=c2r2��t3=c2rl������ϵ�y(t��ng)�ǵ��Ͷ��A�ŷ�ϵ�y(t��ng)����Փ�ϣ��@��ϵ�y(t��ng)���Ը�ۙ������ٶ�׃�������ݔ����Ǽ��ٶ�׃�����t�������`��@�������`�����ݔ����ٶȳ��Լ��ٶȳ���(sh��)����������һ�r�̔�(sh��)�ֽǦն�����ݔ��ģ�M�ǡ�
2- 3��Ҫ���g����(sh��)�x��
�On�������ǙCÿ�D�����ı��ؔ�(sh��)���������Ľ����`�
|