����ls-svm�Ĵ�������ģ���A(y��)�y(c��)����
���٣��S�ٲ������w��
�����I���̴�W(xu��)�Ԅ�(d��ng)���W(xu��)Ժ�������������I150001)
ժ Ҫ��ᘌ�(du��)������(d��ng)�B(t��i)���ܾ����^��(qi��ng)�ķǾ�(xi��n)�ԡ���T�Լ��r(sh��)׃�Ե����c(di��n)�����þ���rbf�˺���(sh��)����С����֧�������C(j��)( ls-svm)���������������ƽ��Ǿ�(xi��n)��ģ�͵��������Ԍ�(sh��)�F(xi��n)��(du��)����ģ����Ч���R(sh��)���õ������������ϵ�y(t��ng)�ķǾ�(xi��n)�Աƽ�ģ�ͣ��������cģ���A(y��)�y(c��)���Ʒ�����Y(ji��)�ϣ�����С����֧�������C(j��)���R(sh��)�õ���ϵ�y(t��ng)ģ�������A(y��)�y(c��)ģ�ͣ�����ϵ�y(t��ng)ģ���M(j��n)�о�(xi��n)�Ի����þ�(xi��n)���A(y��)�y(c��)���Ʒ�����ý����Ŀ����ɣ���(sh��)�F(xi��n)��(du��)����������A(y��)�y(c��)���ƣ��_(d��)�����ú���Ŀ�ġ�����Y(ji��)����������С����֧�������C(j��)������Ӌ(j��)���(f��)�s�ȣ������^��Ӌ(j��)���ٶȣ���С�ӱ���r�¾������õķ���������������С����֧�������C(j��)�Ĵ��������A(y��)�y(c��)����ϵ�y(t��ng)��(du��)���ɔ_��ģ�ͅ���(sh��)�z��(d��ng)�������^�õ��m��(y��ng)�����Լ��õĿ������ܡ�
�P(gu��n)�I�~����С���ˣ�֧�������C(j��)����������ģ���A(y��)�y(c��)����
�ЈD���(l��i)̖(h��o)��tp 27 �īI(xi��n)��(bi��o)�R(sh��)�a��a
1����
��������������u(p��ng)�д����ٿv���ܺÉĵ���Ҫ��(bi��o)��(zh��n)���������ϵ�y(t��ng)�����P(gu��n)ϵ���������еĽ�(j��ng)��(j��)�ԺͰ�ȫ�ԡ��������ں��Ϻ��Еr(sh��)���ܵĔ_��(d��ng)���^��(f��)�s���қ](m��i)����������(w��n)���ԣ��鱣�C�����������������У����ͨ�^(gu��)����ϵ�y(t��ng)�����D(zhu��n)����У�����ڔ_��(d��ng)���a(ch��n)����ƫ����
ģ���A(y��)�y(c��)������20���o(j��)80������l(f��)չ����(l��i)�������㷨�����Ä�(d��ng)�B(t��i)ģ���A(y��)�y(c��)ϵ�y(t��ng)δ��(l��i)�О�
������(j��)ģ�͌�(du��)ϵ�y(t��ng)�M(j��n)�Ѓ�(y��u)�����ƣ����п���Ч���á������ԏ�(qi��ng)����(du��)ģ�;���Ҫ�ߵȃ�(y��u)�c(di��n)���Ǿ��д����Ե��A(y��)�y(c��)�����㷨�����ڴ�������(sh��)�����^��(qi��ng)�ķǾ�(xi��n)�ԣ������b�d׃���ȕ�(hu��)��������(sh��)�z��(d��ng)����������(zh��n)�_�Ĕ�(sh��)�W(xu��)ģ�ͣ���˱����x��������С����֧�������C(j��)54-( ls-svm)��Q����Ǿ�(xi��n)�Խ�ģ��(w��n)�}���c���y(t��ng)֧�������C(j��)��ȣ����������qp���̣��W(xu��)��(x��)�ٶȿ죬�Ҿ����^�õ��ƏV�Ժͺ�(qi��ng)�������ԣ���Ч��ֹ�^(gu��)�W(xu��)��(x��)�F(xi��n)���õ��ĺ���Ǿ�(xi��n)�Աƽ�ģ�͑�(y��ng)����ģ���A(y��)�y(c��)�����㷨�����öಽ�A(y��)�y(c��)���L��(d��ng)��(y��u)��������У���ȿ��Ʋ��ԣ��õ��^�õĴ����������Ч����
2�A(y��)�y(c��)ģ�͵Ľ���
1)������(sh��)�W(xu��)ģ�� ��k-tģ�ͻ��A(ch��)�ϼ���һ��(g��)�Ǿ�(xi��n)���(xi��ng)����������ǣ�����Ǟ�����ʡ���˙MƯ�ٶȣ����У�
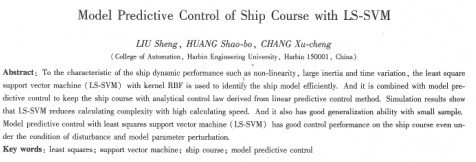
2)������С���˵�֧�������C(j��)ϵ�y(t��ng)���R(sh��)֧�������C(j��)�Y(ji��)��(g��u)����D1��ʾ��
ͨ�^(gu��)�Ǿ�(xi��n)��ӳ�䌢�ӱ����g�еķǾ�(xi��n)�Ժ���(sh��)�D(zhu��n)����߾S���g�У�����һ��(g��)�Ǿ�(xi��n)�Ժ���(sh��)�� (x)ʹݔ��ͨ�^(gu��)����õ��ķǾ�(xi��n)�Ժ���(sh��)���ܱƽ�ݔ���cݔ��֮�g���P(gu��n)ϵ���@���y���ژӱ����g��ֱ��Ӌ(j��)���****��ƽ����D(zhu��n)������ݔ����g�����һ��(g��)�s���l���µ�Ҏ(gu��)����(w��n)�}��
��֧�������C(j��)�м����`���ƽ���(xi��ng)ek2���õ���С����֧�������C(j��)��
ls-svm�ă�(y��u)����(w��n)�}��
���������(y��u)����(w��n)�}�������������պ���(sh��)��
����(j��)kkt�l�������ʽ������lƫ��(d��o)���㣬�õ��������
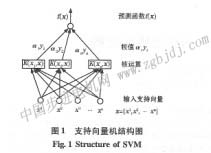
ʽ(5)�x��rbf����˺���(sh��)��  ���У��Ğ�ˌ��ȡ� 3)֧�������C(j��)��ϵ�y(t��ng)���R(sh��)��(sh��)�F(xi��n) ��ij�r(sh��)�̶�Ǧ�(k)��ϵ�y(t��ng)ݔ��u(k)������Ǧ�(k)��ݔ��y��k�����xȡ֧�������C(j��)�A(y��)�y(c��)ģ��ݔ�롢ݔ���քe��u��y����D2��ʾ��
ij����ģ�ͅ���(sh��)�ǣ�t1=1��t2=0.5��t3=5��a=3��kb=0.1���a(ch��n)��100�Mݔ��ݔ����(sh��)��(j��)����Ӗ(x��n)����С����֧�������C(j��)�Ęӱ�������(sh��)�O(sh��)���2=100��c |