����늄әC�D�ٵ��p׃���ͺϿ���
ʷ���ƣ�������
(���ϿƼ���W���������471003)
ժҪ�����˵õ����ӷ������D��ݔ�����OӋ���l�ʡ�늉��p׃���ͺϿ��������в�����늄әC�D���M�п��ơ������l�ʿ���������^���D���`���У����늉���ֵ���Ƅt���D���`���M���{����Ч��Q���D���A�ݠ���׃��늉�͵Ȇ��}�������������Ʋ�����Ч���D�ٿ���Ч�����á�
�P�I�~������늄әC���D�ٿ��ƣ��ͺϿ���
�ЈD���̖��TM383 �īI���R�a��A ���¾�̖��1004��7018(2010)05��0042��03
0 �� ��
����늄әC�Y����ʽ��N���ӣ������в�����늄әC�Ǯa�I���푪������һ�N[1]���S�������I��IJ�����չ�����в�����늄әC���D�ٿ�������Ҳ�����Խ��Խ�ߵ�Ҫ����늄әCϵ�y�r׃����ϷǾ��ԇ��أ���Ҫ���F�����·�Ǿ��ԡ���늲��ϷǾ��ԡ�늙C���D��֮�g�Cе��Ħ���f�Ǿ��Եȷ���[1-3]����ο˷�ϵ�y�еķǾ����������õ��^�õ��D�ٿ������ԣ��dz���늄әC�D�ٿ����о����R�ĺ��Ć��}��
������늄әC���ԣ����õ��D�ٿ���׃������늉���ֵ����늉��l�ʡ�������늉�֮�g����λ����������{���@�����ɿ�׃���е�����һ��������������Ԍ��F�D�ٿ��ơ��F���īI�o���ij���늄әC�D�ٿ��Ʒ�������Æ�һ׃�����ƣ�����늙C����׃��֮�g�ď�����Pϵ��ʹ���@Щ��׃�����Ʒ����y�Գ�ְl�]늙C����[1-3]�����˵õ����õĿ���Ч�������ö����ɿ�׃����ͬ��ʩ���Ƅ������D�ُͺϿ��Ʋ��Գɞ��Ȼ���о�����
�����OӋ�˲����l���c늉���ֵ�ɂ��ɿ�׃�����D�ُͺϿ��Ʋ��ԣ��ڻ���DSP�Č���b��[4]�ό��F���D���]�h���ơ������������Ʋ������_��Ч�����á�
1���l�ʞ����׃�����D���]�h����
����늄әC������늉�����λ��һ��̶���+90�����Ա��C늙C�ĺ����\�Р�B�������^�ߵ�늙CЧ��ָ�˼��^�õ��\�з����ԣ�����ͨ���������{����λ����{�ٷ��������ھ����{�ٷ��������{�����㡢�{�����Զ��^�õȃ��c������늄әC���D�ٿ��ƶ�����{����늉��l�ʵķ����������OӋ���l�ʞ����׃�����D��PID�����������������f�������£�
ʽ�У�Kp��������棻T1��e�֕r�g������TD���֕r�g������
PID���������ƅ���ֱ��Ӱ푿���Ч������회������������M�к��������������،���ĽY���ͅ���������ȫ���գ����Ǖr׃��PID�������ĽY���ͅ�����Ҫ�������ͬF���{ԇ��������PID���������ÏV�����ڌ��H�������ѽ����Y���˶�N��֮��Ч��PID�������������������������������x���Ա��،���Ŀ������Ԟ����������yȡ����늄әC�D���_�h�A�S푑��������������ƞ�S�ͺ���������Ɍ�����늄әC�l�ʿ����D�ق��f����������ʽ(2)��ʾ��һ�A�T�ԼӼ�����h����������zie��gle��Nichol8�������M�п���������������
ʽ�У�K��ϵ�y���_�h�Ŵ���T��ϵ�y�r�g������r�����t�r�g��
��������������Ӌ��õ��Ŀ������������酢����ֵ���ڌ��H���ƣ����ڌ���^���и������H����Ч�����M���{������K�õ����m�Ŀ�����������ͨ�^�{��늙C�����늉����l�ʌ��F���D�ٵ���Ч���ơ�ԓ�D�ٿ�������DsPܛ�����̌��F���c늙Cͬ�S�����B�ӵ�500 p��r��늾��a���Á�y��늙C���H�D���Ԙ��ɷ��������a��ݔ���}�_���B����DsP���@��Ԫ���F�D�ٜy�������]��늙C�Cе�T�Լ���늾��a�����Ȟ�500 p��r�������OӋ���D�ٿ������ڞ�20 ms���ȭh��늉���ֵ�]�h���ƣ��Ա��C늙C�ĺ����\�Р�B�����������ȡ��1 ms�����m��늉�ֵ���^��׃�������˱��o늙C���������O����늉���ֵ���ƺͳ��l���o���ܡ�
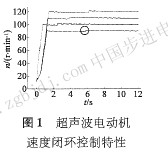
�D1�鲻ͬ�D�ٽo2��ֵ��r�£������{�l�D�ٿ��ƣ����y�õ��ٶ��A�S푑��������D1�У��������������D�ٽo��ֵ�����ϵ������Ξ�120 �D1����늄әCr��min��110 r��min��100 r���ٶ��]�h��������
min��90 r��min���ĈD�п��Կ�����늙C����֮��ܿ��_���o��ֵ�������ڽo��ֵ����������Ч���^�á� |