����ͬ��ֱ��늄әC��λ�û�ģ�������OӋ
��ǰ���S�W�������M
(�|�ϴ�W�����K�Ͼ�210096)
ժҪ�������һ�N���ڻ�ģ���Ƶ�����ͬ��ֱ��늄әCλ���ŷ���������������������λ�õĴ�С��ϵ�y�\�е���܉�E�M�зքe�OӋ���OӋ�ɂ�һ�A��ģ�挍�F�ٶȿ��ƺ;��_��λ�����������ڔ����F���ұ��C��ϵ�y�������ԡ����Y������ϵ�y�܉����OӋ��܉�E�\�У����Fֱ��늄әC�o���{�����١����_��λ��
�P�I�~��ֱ��늄әC����ģ���ƣ�λ���ŷ�
�ЈD���̖��TM341��TM359��4 �īI���R�a��A ���¾�̖��1004��7018(2010)05��0053��03
0����
�n�}�M�����о�һ�N�ɟo�FHaIbach������ͬ��ֱ��늄әC�ӵĸ߾���ƽ��늄әC��ֱ��늄әCֱ����ȡ�������g���ӭh������λ���ȸߣ���ͬ�r��ʹϵ�y�ą����z�Ӻ��ⲿ�_�ӵȲ��_������ֱ�����õ�ֱ��늄әC���\�ӿ����У�������ϵ�y�Ŀ����y�ȣ�ʹPID�Ȃ��y���Ʒ��������ṩ���˝M��Ŀ������ܡ�
�������һЩ�F��������Փ�ijɹ����^�����õ�늙C������[1-3]����ģ������һ�N�dz���Ч�ķǾ����������Ʒ�������****���c�Ǯ�ϵ�y̎�ڻ���ģ�B�r��ϵ�y��B���D�Ʋ���ԭ�Ѕ���׃�����ⲿ�_�ӵ�Ӱ푣�������ȫ�����m���Ժ�������[4]��Ŀǰ���S���W�ߌ���ģ�����ڽ����ŷ��I��đ����M�����о�[3,5-6]��һ���λ�û�ģ���������ٶȲ��ɿأ�����������λ���^��r�����܌��¿�����ݔ���o����ͣ�ʹ늙C�����~���D���\�С��īI179]ᘌ��@һ���}����ϵ�y���ٶ��\���������֞����١����١���p���������֣����F���ٶȿɿأ�����ϵ�y�Ļ�ģ���^�࣬�������OӋ�ď��s�ԣ��Ҷ�����ģ���ГQ���܌���ϵ�yʎ���īI[10]�����һ�N�����Ļ�ģ׃�Y��λ�á��ٶȿ�����һ�w���OӋ�����������ٶȿ������ǽ��bPID���Ƶ�˼�룬�]���M�л�ģ���OӋ�����ܱ��C�ٶȿ��Ƶ������ԡ����������һ�N���ڻ�ģ���Ƶ�����ͬ��ֱ��늄әCλ���ŷ���������ԓϵ�y�����^�ٻ�ģ�挍�F�ٶȿ��ƺ;��_��λ���ұ��Cϵ�y�������ԡ����Y�������������܉�ʹϵ�y�������OӋ��܉�E�\�У��������õ��o�ӑB���ԡ�
1����ͬ��ֱ��늄әC�Y��
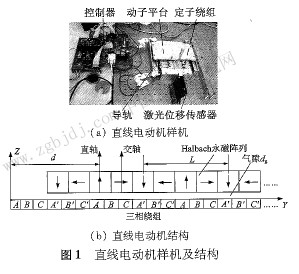
��Dl��ʾ��ֱ��늄әC�әC�Ʉ���ƽ�_������
�@�M����܉������λ�Ƃ��������������ȽM�ɡ�����ƽ�_��4�M�L���S��֧�Σ��ڌ�܉����ֱ���\�ӡ��X�Ͻ���|�Ą���ƽ�_�ϰ��b���Ķ�ʽHalbach������У�ԓ������е�ÿ���O��4�K��ͬ�������w���Dlb��ʾ������ж��ɣ����^��ʾ�����w�ĴŻ����������c����е�һ�ȴň���������һ�ȴň��p�����ҏ��ȴň��ֲ��ʬF���õ������ԡ���Ȧ����Grammeһtype�Y�����h�ξ�Ȧ���b���X�Ͻ���|�Ķ����ı��昋�������@�M��
2ֱ��늄әC���Wģ��
2��1ֱ��늄әC����늴���ģ��
����D0�ֽⷨ������ֱ��늄әC�Ľ���늴���ģ�͡���D1b��ʾ��ֱ�S�ͽ��S��������ЈDʾλ���ϣ�d�龀ȦA�����c��ֱ�S�ľ��x��ֱ��늄әC�Ľ���늴�������[11-12]��
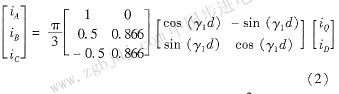
ʽ�У�K�������������c�����w�Ż����ȡ�������нY�����@�M�Y����늙C�O��������϶�߶ȵ����P��iD��iQ��ֱ��늄әC��ֱ�S�����S�����iQ��iD���������iA��iB��iC������׃�Q���̣�
ʽ�У�y1��ň�˥�p��������ֵ�ϵ���2��
2��2ֱ��늄әC�\�ӷ���
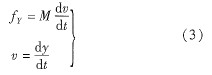
����iD=O�Ŀ��Ʋ��ԣ����]��܉�͝L���S�г�֝������Cе����ɺ��Բ�Ӌ����y�S�����ϑ���ţ�D���ɿɵã�
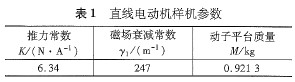
ʽ�У�M�����ƽ�_�|����v�����ƽ�_��y�S�����ϵ��\���ٶȣ�y�����ƽ�_��y�S�����ϵ�λ�ơ� ֱ��늄әC�әC�������1��ʾ��
3���ڻ�ģ���Ƶ�λ���ŷ�ϵ�y�OӋ
�����xȡһ�ٶȻ�ģ���һλ�û�ģ�挍�F�ٶ������ƺ;��_��λ���ҟo횲ɼ�늙C���ٶ���
|