����canopen�f�h��늄ӈ��ЙC���OӋ
�㲼�����̿����︶�A
�A��������W�Ԅӻ��ƌW�ct�̌WԺ���V�|�V��510640
ժ Ҫ��ᘌ���Ҏ��늄ӈ��ЙC���ĬF���Ӿ���ʽ���������������������S�o���y���ɿ��Բ��ߡ��W�jͨ��������ȷ���Ć��}�������һ�N����canopen�f�h�Ŀ�����늄ӈ��ЙC���OӋ�������ں�Ҫ��B늄ӈ��ЙC���ܘ��Ļ��A�ϣ����Ƚo����늄ӈ��ЙC����������Ӳ���OӋ������������Ҫ��B��늄ӈ��ЙC�����Ɔ�Ԫ�·��can����ͨӍ�ӿ��·���OӋ�������o����ܛ���OӋ��˼·�����c��B�ˌ����ֵ���OӋ��canopenͨӍ������OӋ��ᘌ�ͨӍ�����OӋ�е��y�c�������һ�N������з�ʽ�Ĉ���̎��ģʽ������ڌ��H�����гɹ��ؑ�������������OӋ���������ýY�������@�N������늄ӈ��ЙC���������ܻ�����Ϣ�������ֻ������c���܉�M�㹤�I����ϵ�y�ľW�j���lչ����
�P�I�~��canopen�f�h��늄ӈ��ЙC���������ֵ�
�ЈD���̖��tp 273 ֧�I���R�a��a
1����
늄ӈ��ЙC���ǹ��I�^�̿���ϵ�y����ȱ�ٵIJ��֣����V������ʯ�ͻ�����늏S���I����������S����Ӽ��g�Ϳ��Ƽ��g��Ѹ�ٰlչ��늄ӈ��ЙC��Ҳ�@���˿��ٵİlչ������һЩ���a�S�����@���������^�Ƴ��˳�Ҏ�ġ����F������ͨ�Ņf�h�Ŀ�����늄ӈ��ЙC����������������Ŀǰ���a����Ҫ�dz�Ҏ��늄ӈ��ЙC��������ȡ���y�ĬF���Ӿ���ʽ����ÿ�_늄ӈ��ЙC��������Ҫͨ�^7~14�����ƾ����܌��䅢�����f������ϵ�y�Ŀ���ģ���ϡ��@�N��ʽ���b���S�o���r�ߣ�ϵ�y�ĿɔUչ�Բ�����ܬF�������ˆT�ļ��gˮƽ�������B��������w���˞����ص�Ӱ푣��`�����^�ࡣ���⣬����һЩ��������Ҫ��ĭh��������ȼ�ױ���ݗ�䡢���˂������_�ĵط����@�N���y���Ʒ�ʽ�y�Ԅ��Σ����Q�������}��Ҫ����ЙC�����ֻ������ܻ����W�j������lչ���b�ڴˣ����������һ�N����canopen�f�h��늄ӈ��ЙC���OӋ������
2�OӋ��������
canopen�f�h��һ�N�ښW�dz����е�can�ߌӅf�h��ԓ�f�h��������������������ϵ�y���ú����ؘ����ڹ��I�������������õđ���ǰ��������������OӋ�������ڳ�Ҏ늄ӈ��ЙC���OӋ�м���can����ͨӍģ�K��ʹ��ɞ�һ�N�߂係��ͨӍ����������늄ӈ��ЙC�����@�N����늄ӈ��ЙC����ȡ�������Ʒ�ʽ��ֻ��ͨ�^2����̖���������������Ϣ�Ă�ݔ������Ҫ����������߂��˿���ͨӍ���ܣ������ˆTֻ���ڿ����ҾͿɌ����ЙC�������h�̿��ơ�
3 늄ӈ��ЙC��Ӳ���OӋ
늄ӈ��ЙC��Ӳ���OӋ�ǽ������˽�������ܘ��Ļ��A֮�ϵģ���ˣ���Ӳ���OӋǰ�Ⱥ�Ҫ��Bһ��늄ӈ��ЙC���ļܘ���
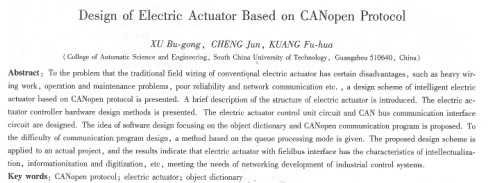
1)늄ӈ��ЙC���ļܘ�늄ӈ��ЙC���Ǹ����{����������λ�C���o���Ŀ�����̖�a��������λ�Ƶ�һ�N�b�ã���Ҫ�ɿ��������ŷ�늙C��λ�Ùz�y�b�ú͜p�����IJ��ֽM�ɣ��䘋����Dl��ʾ��
�������ɼ��yλ�o����̖��λ�÷�����̖���yλ�o����̖����λ�{���b�ý�����ϵ�y�l�ͣ��ɬF���������ա��p��ݔ������̖��λ�Ùz�y�b�ú��γ�λ�÷�����̖�ͽo��������������ݔ�����^һ�����þ��l�������_�PԪ�����^����Ǿ��ԭh��ȥ����늙C���\�D��늙C���Ӝp��������ݔ���S�a��������λ�ơ�
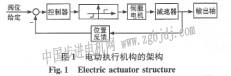
2)��������Ӳ���OӋ������ϵ�yӲ����늄ӈ��ЙC�����Ɔ�Ԫ��can�����ӿچ�Ԫ�M�ɣ���D2��ʾ��
����늄ӈ��ЙC���OӋ����ģ�K���OӋ���x��lpc2292�����@�ɂ���Ԫģ�K������̎������lpc2292��philip��˾�ă�Ƕ��can�������ĸ����܆�Ƭ�C�������l�ʸ��_30 mhz���dz��m�����ڿ�������ϵ�y��늄ӈ��ЙC�����Ɔ�Ԫ��λ�Ùz�y�·��늙C���·�����ϙz�y�����·��Һ���@ʾ�·��λ�Ùz�y�·�Ì�����Ͼ������D�λ������λ�Â�������늙C�� |