ֱ�(q��)���L(f��ng)���l(f��)늙C(j��)�M�и߹�����(sh��)�����������о�
���IJ�����꣬���
(�������I(y��)��W(xu��)���������710072)
ժҪ��ᘌ�(du��)ֱ�(q��)���L(f��ng)���l(f��)늙C(j��)�M�������h(hu��n)��(ji��)�ĸ߹�����(sh��)��Ҫ�����о�����늉�������������ԭ���Ļ��A(ch��)�Ͻ����˻���ǰ��������p�]�h(hu��n)����ϵ�y(t��ng)ģ�ͣ�����SVPWM�{(di��o)�Ʒ�������(sh��)�F(xi��n)�˽�����(c��)������(sh��)���{(di��o)���õ��˷�(w��n)����ֱ��늉����\(y��n)��Matlab��Simulink��(du��)ϵ�y(t��ng)�M(j��n)���˷��棬���~���D(zhu��n)�ٞ�220 r��min���~���D(zhu��n)�؞�1000 N��m��PMSGģ�����齻��Դ�������N��ͬ�L(f��ng)����(du��)ϵ�y(t��ng)�M(j��n)�з������������Y(ji��)���(y��n)�C�˷����ă�(y��u)Խ�ԺͿ����ԣ���ֱ�(q��)���L(f��ng)���l(f��)�ϵ�y(t��ng)���о�����Ҏ(gu��)ģ��(y��ng)�õ춨�˻��A(ch��)��
�P(gu��n)�I�~���L(f��ng)���l(f��)늣�SVPWM������늉���������
�ЈD���̖(h��o)��TM315 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2010)05��0067��03
ժҪ��ᘌ�(du��)ֱ�(q��)���L(f��ng)���l(f��)늙C(j��)�M�������h(hu��n)��(ji��)�ĸ߹�����(sh��)��Ҫ�����о�����늉�������������ԭ���Ļ��A(ch��)�Ͻ����˻���ǰ��������p�]�h(hu��n)����ϵ�y(t��ng)ģ�ͣ�����SVPWM�{(di��o)�Ʒ�������(sh��)�F(xi��n)�˽�����(c��)������(sh��)���{(di��o)���õ��˷�(w��n)����ֱ��늉����\(y��n)��Matlab��Simulink��(du��)ϵ�y(t��ng)�M(j��n)���˷��棬���~���D(zhu��n)�ٞ�220 r��min���~���D(zhu��n)�؞�1000 N��m��PMSGģ�����齻��Դ�������N��ͬ�L(f��ng)����(du��)ϵ�y(t��ng)�M(j��n)�з������������Y(ji��)���(y��n)�C�˷�����Խ�ԺͿ����ԣ���ֱ�(q��)���L(f��ng)���l(f��)�ϵ�y(t��ng)���о�����Ҏ(gu��)ģ��(y��ng)�õ춨�˻��A(ch��)��
�P(gu��n)�I�~���L(f��ng)���l(f��)늣�SVPWM������늉���������
�ЈD���̖(h��o)��TM315 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2010)05��0067��03
�о��� ��(y��ng)�õ춨�˻��A(ch��)��
1 ����VSR��(sh��)�W(xu��)ģ��
1.1 ����VSR�·��?f��)?/DIV>
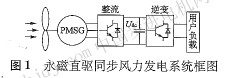
����VSR�·��?f��)���D2��ʾ������Ҫ����������(c��)��Ч늸�L�����R��ȫ���_(k��i)�P(gu��n)����IGBT���m(x��)�����O�ܽM�ɵ�����ȫ���·��ֱ�����C��ؓ(f��)�dRL��ea��eb����λ����120��늉�Դ����������(g��)늸Сꡢ����(g��)���R�Լ�����Դea��eb��ec�ֿɿ������ཻ���l(f��)늙C(j��)��ģ�͡�
2����VSR�Ĕ�(sh��)�W(xu��)ģ��
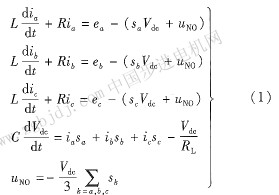
����VSR�Ĕ�(sh��)�W(xu��)ģ���Ǹ���(j��)����VSR��?f��)�Y(ji��)������(g��u)�������·�������Ɍ�(du��)VSR��������һ�㔵(sh��)�W(xu��)���������īI(xi��n)[3]�����o���������oֹ����(bi��o)ϵ��VSR�Ĕ�(sh��)�W(xu��)ģ�ͷ�ӳ�����������_(k��i)�P(gu��n)��(x��)��(ji��)�����C(j��)��������
ʽ�У�sk���ֵ߉�_(k��i)�P(gu��n)����(sh��)��sk=a��b��c��sk=1���Ϙ���_(k��i)�P(gu��n)������(d��o)ͨ������_(k��i)�P(gu��n)�����P(gu��n)�ࣻsk=0���Ϙ���_(k��i)�P(gu��n)�����P(gu��n)�࣬����_(k��i)�P(gu��n)������(d��o)ͨ������Park׃�Q��������������ģ��׃�Q������ͬ�����D(zhu��n)d��g����(bi��o)ϵ��ʹd�S�����ڰl(f��)늙C(j��)늉�ʸ�����õ��������ڃ���ͬ������(bi��o)ϵ�µ�ģ�͞飺
2���Ʒ���
2.1ǰ��������Ʋ���
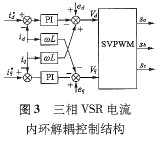
����vSR�茍(sh��)�F(xi��n)�ɂ�(g��)����Ŀ��(bi��o)���ٷ�(w��n)��ֱ����(c��)늉����ڽ�����(c��)���ܿع�����(sh��)���������һ������p�]�h(hu��n)���ơ����p�]�h(hu��n)�����У�늉���h(hu��n)������������ֱ����(c��)늉��������(n��i)�h(hu��n)����(j��)늉���h(hu��n)ݔ����ָ������M(j��n)��������ơ�
��ʽ(2)���Կ���������PwM�������Ĕ�(sh��)�W(xu��)ģ����ݔ�����d��q�S�����g������ϣ��@�o�������O(sh��)Ӌ(j��)����(l��i)���y������늉����������ǰ���a(b��)���M(j��n)�н�������ú�(ji��n)�εğo(w��)�o��PI�{(di��o)��(ji��)��������h(hu��n)늉�����������(n��i)�h(hu��n)�������������(sh��)�F(xi��n)d��g�S����Ī�(d��)
������[5-6]����D3��ʾ��
2��2 svPwM�{(di��o)���㷨
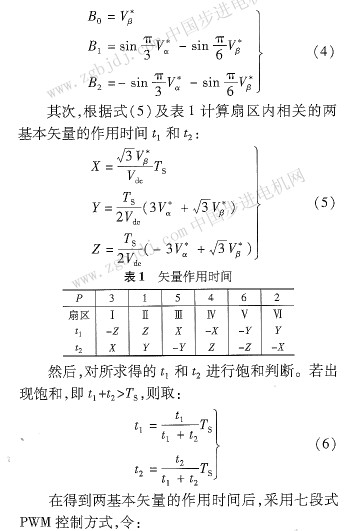
svPwM�{(di��o)���㷨��ͨ�^(gu��)������׃����ͬ���_(k��i)�P(gu��n)ģʽ��ʹ��׃��˲�r(sh��)ݔ���������}�_늉���(g��u)�ɵ�늉����gʸ���c������ݔ����������(du��)�Q���Ҳ�늉���(g��u)�ɵ�늉����gʸ�����Ч�����w��(sh��)�F(xi��n)�㷨���£�
���ȣ���Vd��Vq�D(zhu��n)�Q������oֹ����(bi��o)ϵ�µ�V����V���M(j��n)������(j��)ʽ(3)��ʽ(4)�Д�ָ��늉�ʸ�����ڵ��ȅ^(q��)��
 < |