�ӑB�h�����ƄәC����·����ۙ�c����
������1�����_��2
��1��̎����WԺ�Cе���̌WԺ�����300222,2��c�����WԺ�����c늚���Ϣ���̌WԺ����������c163712��
ժ Ҫ������ģ���W�j���Y��ģ��߉���Ƶķ������о��ڄӑB�h�����ƄәC���˵��ھ�·����ۙ�c���r���φ��}��ᘌ��ƄәC���˵��\�ӌWģ�ͣ������c�cֱ�����ľ��x�Pϵ�OӋ���ƄәC���˵�·����ۙ�㷨�������һ�N����ģ���W�j���ƄәC�����ھ�·����ۙ���������ø��M��bp�㷨���W�j�M�ЌW���cӖ���������ݶ��½����{���W�j�ę�ֵ�c�}ֵ��ʹ�䌍�Hݔ���c����ݔ�����`���������С��ͬ�r���\��ģ��߉���ƣ����F���ƄәC���˵Č��r�M�Ϸ��挍���C���˿��Ʒ�������Ч�ԣ�������������ĸ�ۙ�㷨�c���Ʒ����������õĄӑB·����ۙ�c���r����������
�P�I�~���ƄәC���ˣ�·����ۙ��ģ���W�j������
�ЈD���̖��tp 27 �īI���R�a��a
1����
·����ۙ���ƄәC���������������Ҫ�Ć��}֮һ��������ɹ����΄�����횾߂�������О�֮һ���������ڄӑB�h���£��ƄәC���˵�·����ۙ����һ���^�y��Q�Ć��}����Ҫ���ƄәC���������M�^���бM����Ҫƫ�x��ָ����·�������������\�ӵ��ϵK��r���ò��@�_���ߣ����ڶ��^�ϵK����ƄәC���˱�횻ص�ԭ·����ֱ�����_Ŀ�ĵء�
Ŀǰ���P���ƄәC����·����ۙ���о��ɹ��ܶ࣬���������Dz��þ��Է������ƻ�Ǿ��Է������ƣ����H��Ҫϵ�y�ʴ_���\�ӌW������Wģ�ͣ������OӋ���s���������c���r����Ч��Ҳ���ã�����ģ���������ƄәC����·����ۙ�������mȻ����Ҫ����ϵ�y���_�Ĕ��Wģ�ͣ���ģ��Ҏ�t�y������㵽����ȱ������������ģ���W�j���W�j�cģ����Փ�Y�ϵĮa��������ЏV���ıƽ����ԣ�߀�Ɍ��F��ݔ�뵽ݔ��������Ǿ���ӳ�䡣��ˣ����IJ���ģ���W�j���F���ƄәC���˵��ھ�·����ۙ������ģ��߉���ƌ��F���ƄәC���˵Č��r���ϣ���ͨ�^���挍���C�������������·����ۙ�㷨�c���Ʋ��Ե��ƴ_���c��Ч�ԡ�
2�ƄәC����·����ۙϵ�y��ģ
����ᘌ���݆�����ӵ�݆ʽ�ƄәC�����M���о����S��݆�H���\���^������֧�����ã������\�ӌWģ���е�Ӱ푺��Բ�ӛ���քe���ƄәC���˵�ƽ���ٶ��c���D�ٶȡ��ƄәC���˵��\�ӌWģ�͞�
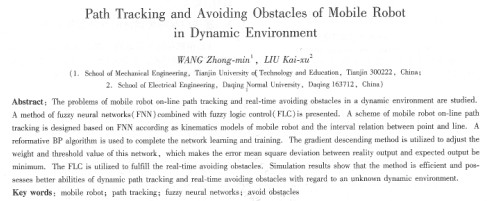
��ˣ�ֻҪ����u =[v,w]t���Ϳ��Եõ���ǰ�ƄәC���˵Č��rλ�ˡ����ƄәC��������ۙ��·���ָ������·���c������·���c�g�����B���͘���ԓ·�������Ã��c�g�B���O֭�ƄәC���˵�·����ۙ�㷨����D1��ʾ��
���O�ƄәC��������4�c��b�c�g��ֱ���\ ����ۙģ�͵ķ��������IJ�����һ���˜ʵ�5��ģ�ӣ��C�����c·������ĊA�Ǟ�ȣ��ȵķ�����[-�У���]�� a�c�����˞�a��xa��ya����b�c�����˞�b��xb��yb�����ƄәC���˵Į�ǰ���˞�p(xp,yp)���t4�c�cb�c�g��ֱ������4��
���x�ƄәC����ƫ�x·���ľ��x��d���t�����c��ֱ���ľ��x��ʽ���ã�
���о����}��Ҫ�����C����������ۙ·�����Ϸ��r�����xd���������C���������·����td���x��ؓ�����x�C������r��D�ӕr���Ȟ�����형r��D�ӕr���Ȟ�ؓ�����C�����\�ӷ����c·������һ�r�����x��0.
3����ģ���W�j��·����ۙ���F
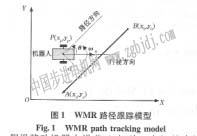
1)���W�j(fnn)�팍�F���Y����D2��ʾ��
de�ͦ�e���ƄәC���˵�����λ�ã���dr�ͦ�r���䌍�Hλ�á���һ�Ӟ�ݔ��ӣ��������nj�ݔ��ֵ���͵���һ�ӡ��ڶ��ӱ�ʾ |