ֱ���v���ͳ�늙C�Ľ��|�����Ͷ��D����ģ��
�S������־�s
���K�����I��W�C늹���ϵ���K��215104��
ժ Ҫ��Ħ�����挦��늙C�����������P��Ҫ��Ӱ푡�����ᘌ�һ�N���������ӵ�ֱ���v����늙C���Y��늙C�Ĺ������ͣ���늙C�Ķ����D�ӵĽ��|�^���M����Ԕ�M��Փ���������˶��D��r�µ�****ݔ����ģ�ͣ����M���˷����о���ͨ�^������Եó���늙C�Ķ��D�����ܶ����D�b���g϶��Ӱ�****����늙C������������r�¡���Ҫ�õ��^��Ķ��D���������m���{�����D�ӵ��b���g϶��
�P�I�~����늙C��Ħ�����棻����ģ��
�Ї����̖��tm359.9 �īI��־�a��a ���¾�̖��1001-6848( 2010)05-0019-03
o�� ��
������ԭ����ͬ����늙C�ɷ֞��в��ͺ��v���Ѓɴ����Ŀǰ���������P��늙Cؓ�d���Լ�Ħ��������īI�����Ҫ���P���в������D��늙C��ֱ���v���ͳ�늙C��һ�N�^�µĮaƷ������ᘌ�һ�N���������ӵ�ֱ���v���ͳ�늙C�Ľ��|�^���M���˼��µ��о�����������ԓ��늙C�Ķ��D����ģ�͡�
1 ֱ���v���ͳ�늙C�Ķ��D����ԭ��
�������OӋ��늙C�ǻ��������ӣ�ͨ�^�����ĽY���OӋʹ늙C���Ӯa��ͬ�l��һ�A�v��Ͷ��A������늙C�����ϱ��棨���棩�Ϻϳ������ęE�A�\�ӣ�ͨ�^���D��֮�g�Ľ��|��������Ħ�����ã���Ħ��������ʽ����ݔ����һ���ڶ����D���gʩ��һ�����A�����������ö��߽��|
�O�v�������a�����������b���t�v�����ͺ����͏������ͺ������£�
�v����s���λ�ƺ����飺
�M�������λ�ƺ����飺
��ʽ(2)��ʽ(3)����ȥ�r�g�����ɵã�
���Կ���������-��=��/2�r��ʽ(5)׃��һ�E�A��
�����v��͏������λ���90�ȕr��������ÿһ�c���\��܉�E��һ�E�A���@�r�v����s���λ�ƺ����͙M�������λ�ƺ���׃�飺
�t���Ӹ��c��ˮƽ�ٶȞ飺
2ֱ���v���ͳ�늙C���D�ӽ��|����
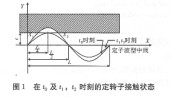
һ���ڳ�늙C�Ķ��Ӻ��D��֮�g��һ�Ӳ��|�����^ܛ��Ħ�����ϣ���늙C�����r�����ӱ����݆�����ɽ��ƞ����Ҳ��Π���A���������^С�r���ɼٶ��������D�ӱ������a�����|��׃��ֻ��Ħ���Ӯa��������׃�Ρ����ڶ��D�ӽ��|�����ϣ�Ħ���ӵ�׃���c���ӱ����݆����һ�¡��O�r��늙C�������ڶ��A����������cĦ�����R����|��t2�r��늙C�������ڶ��A����������cĦ�����R��Ó�x���|��to�t�ǽ���t1��t2�ɂ��r��֮�g��ijһ�r�̡��tt0��tl��t2�r�̵�늙C���D�ӵĽ��|��B��Dl��ʾ��
�g��e��ʾĦ���������ɱ��棨t���棩δ�l��׃�Εr�ඨ�ӱ��沨���о���x�S���ľ��x��x1��x2��to�r�̶����cĦ�����ϵ��R����|�c�����Կ������ӿ�����x= l/4̎�����cĦ�������Ƚ��|������ǰ�낀���Σ���x���ڣ�o��1/2���r�����ӽ��|��ʼ�K�P��x= l/4���Q����x=l/4����ʽ(7)�У���y =c��������î�coswt1= c/b�r���R����|�r��t1���������cĦ�������С��Y��ʽ(6)����cos(t)��׃��������һ�������ﶨ���cĦ���ӵĽ��|��r��
|