���ڷ�늄ݞV�������ğo������bldcm����
�����G�������ޣ�Ҧ�Ԗ|
���A�|������W(xu��)��Ϣ�ƌW(xu��)�c���̌W(xu��)Ժ���Ϻ�200237��
ժҪ��Ŀǰ��(y��ng)���ڟo������bldcm�Ŀ��Ʒ������Dz���λ�Ùz�y�·ĩ�g�ӫ@���D(zhu��n)��λ����Ϣ����(sh��)�F(xi��n)��bldcm�Ŀ��ơ�ԓ�����һ�N����ʡ��λ�Ùz�y�·�Ļ��ڷ�늄ݞV���ķ��������Ԝ�(zh��n)�_�@�÷�늄��^���c(di��n)���(q��)��bldcmƽ��(w��n)�\(y��n)�С�����tms320lf2407a�Ŀ���ƽ�_�M(j��n)�Ќ�(sh��)�(y��n)���Y(ji��)���C����ԓ��������Ч�ԡ�
�P(gu��n)�I�~����늄ӄݞV�����oˢֱ��늙C(j��)���o���������ƣ���(sh��)����̖̎����( dsp)
�ЈD���̖��tm36 +1 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848( 2010)05-0066-04
0����
Ŀǰ����(y��ng)���ڟo������bldcm���Ƶķ����ܶ࣬�練늄ݙz�y���������@�M늸з����ٶȟo�P(gu��n)λ�ú���(sh��)�������ڔU(ku��)չ�������V����(ekf)�Ġ�B(t��i)�^�y���������ܻ����Ʒ�����ģ�����ơ���(j��ng)�W(w��ng)�j(lu��)�����Լ�С����(j��ng)�W(w��ng)�j(lu��)���Ƶȣ��ȵ�.���@Щ����������λ�Ùz�y�·����A(ch��)�ģ����H�������·�ď�(f��)�s�Ժͳɱ���Ҳ�����˿��ư���w�e����˱����������Ҫλ�Ùz�y�·�Ļ��ڷ�늄ݞV���ķ�����ֻ��Ҫ�ׂ�(g��)��茢��늄���̖������tms320lf2407aоƬ��ad�ɘ�ģ�K�Ĺ���늉�������(n��i)��ԓ�����·��(sh��)�F(xi��n)���οɿ��������܉�@�Ü�(zh��n)�_�ķ�늄��^���c(di��n)�����Դ���?zh��n)��y(t��ng)��λ�Ùz�y�·�@ȡ�D(zhu��n)��λ����Ϣ��
���ڷ�늄���̖�c늙C(j��)�D(zhu��n)�������ȣ��ڵ��ٺ��oֹ��r�£���늄���̖��С���ߛ]�У����@�N��r���ҵ��^���c(di��n)�Ƿdz����y�ģ����ڸ��م^(q��)��늄���̖��ֵ�^�����^���c(di��n)�������ף������S���D(zhu��n)�ٵ���ߣ���λ���tҲ��Խ��Խ����˽o�Q���r(sh��)�̵Ĵ_���������y[46]�����Č�Ԕ��(x��)ӑՓ���σɂ�(g��)���}�����o�����ڷ�늄ݞV�������ğo������bldcm���ƌ�(sh��)�(y��n)�Y(ji��)����
1��늄ݞV�����Ʒ�������
��늄ݙz�y���Ʒ��Ļ���ԭ�����ں������şoˢֱ��늄әC(j��)늘з���(y��ng)Ӱ푵�ǰ���£�ͨ�^�z�y�����_�ࡱ�ķ�늄��^���c(di��n)������һ��Ҏ(gu��)�t���m��(d��ng)���t��õ������������_�|�l(f��)�r(sh��)�̣��ٰ���늙C(j��)���\(y��n)�D(zhu��n)������һ�������݆���|�l(f��)����(g��)���ʹܣ����Ɍ�(sh��)�F(xi��n)���o������bldcm�Ŀ��ơ��ɴ˿�Ҋ����νo��һ��(g��)�ɾ��_�R�e�^���c(di��n)���㷨���Ķ���Ӌ(j��)�D(zhu��n)��λ�ã�ʹ늙C(j��)�@�M�����_�ĕr(sh��)�g�M(j��n)�ГQ���nj�(sh��)�F(xi��n)bldcm���Ƶ��P(gu��n)�I��
�����ķ�늄��^���c(di��n)�z�y����ͨ�^λ�Ùz�y�·�팍(sh��)�F(xi��n)�ģ�һ���ɸ��x���V���ͱ��^����(g��)�h(hu��n)��(ji��)��(g��u)�ɣ�λ�Ùz�y�·�õ��ķ�늄���̖����dsp�IJ��@���_������(j��)һ����Ҏ(gu��)�t�a(ch��n)���Q����̖�����ƹ��ʹܵČ�(d��o)ͨ�c�P(gu��n)�࣬�(q��)��늙C(j��)�\(y��n)�С�
�ڌ�(sh��)�H��r�£��ڔ��_�^(q��)�g�η�늄ݴ�����������һ����ρ��Ԍ�(d��o)ͨ�^(q��)�g�ε����������@�M��pwm�(q��)����̖��ϵ��@�M��bemf��̖�ϡ��@Щ����ʹλ�Ùz�y��̖���e(cu��)����(d��o)��늙C(j��)�o�������\(y��n)�D(zhu��n)����ˣ���Ҫ����һ�N��Ч�ķ������@ȡ�ɿ��ķ�늄��^���c(di��n)��
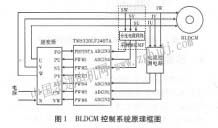
��������Ļ��ڷ�늄ݞV�����^���c(di��n)�z�y������ʡ����λ�Ùz�y�·��ֱ�ӌ��։���ķ�늄���̖����dspоƬadc�˿ڣ�Ȼ��늄���̖�M(j��n)�вɘӣ��S��ͨ�^ܛ���V���ķ�������늄���̖�M(j��n)��̎�����@ȡ��(zh��n)�_�ķ�늄��^���c(di��n)���ٌ����M(j��n)���m��(d��ng)?sh��)ĞV�����t�a(b��)������K�õ����_�ēQ��r(sh��)�̣���(sh��)�F(xi��n)�o������bldcm�Ŀ��ơ�����dspfms320lf2407aƽ�_�ķ�늄ݞV�������ğo������bldcm����ϵ�y(t��ng)��ԭ����D��D1��ʾ��
늙C(j��)���ٺ��ٕr(sh��)��늄ݵ�������e�^����˷�늄ݞV�����Ʒ�����ͬ��������w��B���م^(q��)�g��늄ݞV�����Ʒ������م^(q��)�g�ķ�늄ݞV�����Ʒ�����
2���م^(q��)�g�ķ�늄ݞV�����Ʒ���
���ڵ��م^(q��)�g�ķ�늄ݷ�ֵ�^С�����ijһ�����_�^(q��)�g�ķ�늄���̖��б��Ҳ���^С���ټ��ϸ��N��������Ӱ푣�ʹ���ڔ��_�^(q��)�g�z�y��̓���^���c(di��n)��̖�ĸ����^��
ᘌ��@�N��r�����IJ�ȡ�ķ����ǣ���u(a)��v(b)��w(c)����ͬ�r(sh��)�M(j��n)���B�m(x��)�ɘӣ��@���@����(g��)�ɘӽY(ji��)��֮�����a(ch��n)��һ��(g��)adc�Д࣬Ȼ���@Щ�ɘӱ���������(g��)��ͬ��iir�V�������a(ch��n)������(g��)�V���ɘӣ���ԓ�ɘ�ֵ�c�^���ֵ�M(j��n)�б��^���_���^���c(di��n)��
����timerl���ڜy����һ��(g��)�^���c(di��n)����һ��(g��)�^���c(di��n)�� |