���ڶ�ģ���܅f(xi��)�{(di��o)���Ƶĸ����ܽ����ŷ�ϵ�y(t��ng)
����𣬱RС÷
��տ�������W(xu��)Ժտ��524048��
ժҪ������(j��)�����ŷ�ϵ�y(t��ng)�����ܵ�Ҫ���O(sh��)Ӌ(j��)��һ�N���ڶ�ģ���܅f(xi��)�{(di��o)���ƵĽ����ŷ�ϵ�y(t��ng)����(sh��)�(y��n)�Y(ji��)��������ԓ���Ʒ���푑�(y��ng)�졢�����ԏ�(qi��ng)��ϵ�y(t��ng)�����^�õĄ�(d��ng)���o�B(t��i)���ܺͿ��ɔ_������
�P(gu��n)�I�~��ģ�����ƣ���(j��ng)���ƣ������ŷ�ϵ�y(t��ng)����ģ���܅f(xi��)�{(di��o)����
�ЈD���(l��i)̖(h��o)��tp273 +.4 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010)05-0077-03
0�� ��
�����ŷ�ϵ�y(t��ng)�ɽ���늄�(d��ng)�C(j��)�M�ɣ��䔵(sh��)�W(xu��)ģ�;��зǾ�(xi��n)�ԡ���ϡ��r(sh��)׃�����c(di��n)�����Ʋ��Ա��^��(f��)�s����������(d��ng)ϵ�y(t��ng)���{(di��o)�������c�������õĿ��Ʋ�������ֱ�ӵ��P(gu��n)ϵ��ÿһ�N���Ʋ��Զ��������L(zh��ng)�����ֶ���������ijЩ�������һЩ��(w��n)�}����ˣ����N���Ʋ��ԑ�(y��ng)��(d��ng)�����B��ȡ�L(zh��ng)�a(b��)�̣��Y(ji��)���γɏ�(f��)�Ͽ��Ʋ��ԣ��Ը��õ���߿������ܡ����������һ�N��ģ���܅f(xi��)�{(di��o)���Ʋ��ԣ����ܾC�ϸ��N���Ʒ����ă�(y��u)�c(di��n)�����O(sh��)Ӌ(j��)��һ�N���ڶ�ģ���܅f(xi��)�{(di��o)���ƵĽ����ŷ�ϵ�y(t��ng)��ͬ��Ҏ(gu��)׃�Y(ji��)��(g��u)���ƣ��ГQ���ƣ���ȣ�����ǰ�ߵ��c(di��n)�ГQ�Ğ�����(du��)ƽ���������ГQ�����������ŷ����ƵĄ�(d��ng)���o�B(t��i)���ܣ�ȡ���˝M(m��n)���Ч�������ҟo(w��)����ه(l��i)���_�Ĕ�(sh��)�W(xu��)ģ�ͣ����Q��ο��ƴ��ڷǾ�(xi��n)�ԺͲ��_���ԵĽ����ŷ�ϵ�y(t��ng)�����һ�N�Ќ�(sh��)���еķ�����
l ��ģ���܅f(xi��)�{(di��o)���ƵĽ����ŷ�ϵ�y(t��ng)
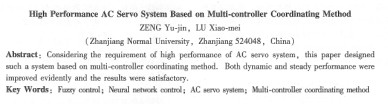
����rbf��(y��u)����ģ����(j��ng)��υf(xi��)�{(di��o)���ƽ����ŷ�ϵ�y(t��ng)�ĽY(ji��)��(g��u)��Dl��ʾ������rbf��(y��u)����ģ������(j��ng)Ԫ��υf(xi��)�{(di��o)�������ɴ��{(di��o)ģ��������flc����(x��)�{(di��o)����(j��ng)Ԫ�W(w��ng)�j(lu��)������nnc��rbf��(y��u)���f(xi��)�{(di��o)��������(g��)��Ҫ�������M�ɡ�
1.1���{(di��o)ģ��������flc
��(d��ng)λ���`���^��r(sh��)���҂����`��`��׃���ʺ��ٶȽo���������ȼ�(j��)�������{(di��o)�����ӵ�ģ�����Ʊ��_(d��)ʽ�飺
��ʾ��(du��)���Д�(sh��)��(j��)������ԭ�t�M(j��n)���\(y��n)�㣺
im(x)��ʾ��(du��)zȡ������(d��ng)λ���`���^��r(sh��)��ȡ�ô�Щ����ʾ��(du��)�`��e�ļә�(qu��n)ֵ���Ƶ���ҪĿ���������`�����(d��ng)λ���`���^С�r(sh��)������Ҫ�Ŀ���Ŀ����ʹϵ�y(t��ng)�M�췀(w��n)������(zh��n)�_��λ���o(w��)���{(di��o)��С���{(di��o)�����ʹ�`��׃����e�ļә�(qu��n)��Щ����ȡֵСЩ��ᘌ�(du��)��ͬ���`��ȼ�(j��)�������քeȡvֵ�飺
����ʽ�Á�(l��i)��(sh��)�F(xi��n)flc��ģ����������D2��ʾ�����ܼӿ�ϵ�y(t��ng)��푑�(y��ng)�ٶȡ�
1.2����(j��ng)Ԫ������nnc
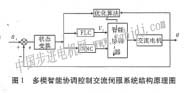
��(d��ng)�`��e�^��r(sh��)�����Æ���(j��ng)Ԫ��������(hu��)ʹ���(qu��n)ֵ��(hu��)׃�úܴ�����?x��)����?j��)���������Ӱ푿���Ч��������������(j��ng)Ԫ��Ҫ�����W(xu��)��(x��)���{(di��o)����(qu��n)ֵ����푑�(y��ng)�^(gu��)�̲���ģ�����ƿ죬�����`���^С�r(sh��)��(j��ng)Ԫ���������з�(w��n)�B(t��i)���ȸߡ������ԏ�(qi��ng)�ă�(y��u)�c(di��n)����ˣ��`���^С�r(sh��)���Բ�ȡ����(j��ng)Ԫ���ơ�����(j��ng)Ԫ�Y(ji��)��(g��u)��D3��ʾ��
��ȡ�Ŀ��Ʋ��Ԟ飺
ʽ�У�umax����ֵ������x1��x2,��x3�քe���`��`���֡��`��e�֣��ÌW(xu��)��(x��)Ҏ(gu��)�t�{(di��o)����ݔ�����ę�(qu��n)ֵ����(g��)��(j��ng)Ԫ���ஔ(d��ng)��׃ϵ��(sh��)�����m��(y��ng)pid�{(di��o)��(ji��)����������������m��(y��ng)�������־߂���y(t��ng)pid�������ă�(y��u)�c(di��n)����ʹϵ�y(t��ng)�Ą�(d��ng)�B(t��i)����ֻ��ه(l��i)�����`����̖(h��o)�������ܻ����܌�(du��)��ģ������(sh��)��Ӱ푣��Ķ����ϵ�y(t��ng)�������ԡ�
1.3���܅f(xi��)�{(di��o)��rbfc
rbf�W(w��ng)�j(lu��)�е����ú���(sh��)�Ǹ�˹������(sh��)���Ǿֲ��ģ�����Ǿֲ��ƽ�����(j��ng)�W(w��ng)�j(lu��)�����ЌW(xu��)��(x��)�ٶȿ�ă�(y��u)�c(di��n)���m�����ŷ�ϵ�y(t��ng)�ο�����Ҫ�ʱ��IJ��û���rbf�W(w��ng)�j(lu��)�ąf(xi��)�{(di��o)��rbfc��(l��i)��(sh��)�F(xi��n)��������f(xi��)�{(di��o)���ƣ�rbfc�ĽY(ji��)��(g��u)��D4��ʾ��
|