�p���L(f��ng)늙C�M���Խ�ģ�����Է���
�\��
(�A�������W(xu��)�����cӋ��C���̌W(xu��)Ժ������102206)
ժҪ�����о��p���L(f��ng)늙C�M׃�ٺ��l�\�Еr�l(f��)늙C�����ԣ���(y��ng)��С�_�ӷ��������������p���l(f��)늙C����ģ�͡��Y(ji��)�ϙC�M�����r�c�Ͼ���ģ�͵ĘO�c���������Y(ji��)���l(f��)늙C��׃���\���ЄӑB(t��i)����׃����Ҏ(gu��)�ɡ������Y(ji��)����Ŝ���l(f��)늙C����ϵ�y(t��ng)�O(sh��)Ӌ������������(sh��)�����ṩ�˅�������(j��)��
�P(gu��n)�I�~���L(f��ng)���l(f��)늣�׃�ٺ��l���p���l(f��)늙C
�ЈD���̖��TM 315�īI��(bi��o)־�a��A���¾�̖��1673��6540(2010)05 0007��04
0 ����
�����p��늙C�Ľ������׃�ٺ��l(VSCF)�L(f��ng)���l(f��)�ϵ�y(t��ng)�����F(xi��n)�˙C�ϵ�y(t��ng)�������B�ӣ�����ʹ�L(f��ng)���C�\�з����_��ͬ���ٵ�70����130�������ӝM����L(f��ng)�����L(f��ng)���Cۙ****�L(f��ng)�ܵĿ������l(f��)�Ч�ʸ��ߡ���ˣ�����u�ɞ��L(f��ng)���l(f��)늵�������ʽ��
�p���l(f��)늙C�����p��׃�l�����D(zhu��n)�@�M���D(zhu��n)���l���M�н�����ţ��M���M�㶨�ӂ�(c��)�l��Ҫ������ϵ�y(t��ng)����ͨ������ʸ�����Ƽ��g(sh��)������������D(zhu��n)�ط����̈́�ŷ����M�н�����F(xi��n)�й����o��ݔ���Ī����{(di��o)��(ji��)[1-3]�����ɷ���֮��߀�������c�l(f��)늙C�D(zhu��n)�������P(gu��n)��������ã���(d��o)���ڲ�ͬ�D(zhu��n)���°l(f��)늙C���F(xi��n)����ͬ�ĄӑB(t��i)���ԣ����܅���(sh��)�z�y�ٶȺ;��ȵ�Ӱ푡����H�\��������y����ȫ�a�����o׃���\���п���Ч���ı����������y�ȡ�
���Č��p���l(f��)늙C׃�ٺ��l�\���ЄӑB(t��i)����׃��Ҏ(gu��)���M�з�������ͬ�����D(zhu��n)����(bi��o)���p���l(f��)늙Cϵ�y(t��ng)�Ǿ��Ԕ�(sh��)�W(xu��)ģ�͞���A(ch��)����(y��ng)��С�_�ӷ��������������C�M����ľ���ģ��ͨ�^����ͬ�\�й��r��ģ�͘O�c�ֲ���r�ķ��������Y(ji��)���p���l(f��)�ϵ�y(t��ng)�ӑB(t��i)����׃��Ҏ(gu��)�ɣ����p���l(f��)늙C����ϵ�y(t��ng)�O(sh��)Ӌ������������(sh��)�����ṩ��������(j��)��
1 �p�����L(f��ng)���l(f��)�ϵ�y(t��ng)
1��1ϵ�y(t��ng)�Y(ji��)��(g��u)
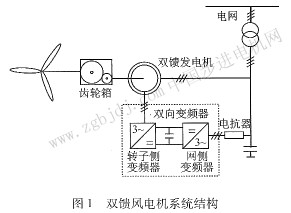
�p�����L(f��ng)���l(f��)�ϵ�y(t��ng)�Y(ji��)��(g��u)��D1��ʾ���L(f��ng)���Cͨ�^׃���X݆���c�p���l(f��)늙C���B���l(f��)늙C�����@�Mֱ�ӽ��˹��l늾W(w��ng)���D(zhu��n)���@�M�Ӿ�������ֻ���h(hu��n)������ͨ����һ�_�p��׃�l������늾W(w��ng)�����Ԍ��D(zhu��n)���M�н�����ţ����D(zhu��n)���@�M�������l�ʝM�㣺
ʽ�У�f1����늾W(w��ng)�l�ʣ�
f2�����D(zhu��n)�ӄ������l�ʣ�
fm�����D(zhu��n)�����D(zhu��n)�l�ʣ�
np����늙C�O����(sh��)��
��ˣ��p���l(f��)늙C���Ӹ���늉�ʼ�K�M��늾W(w��ng)�l�ʣ��Ķ����Cϵ�y(t��ng)׃�ٺ��l�\�С�
1.2ϵ�y(t��ng)��(sh��)�W(xu��)ģ��
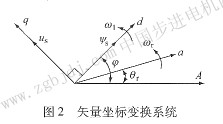
����ڷ����p���l(f��)늙C���ԣ�ͨ����dqͬ�����D(zhu��n)����(bi��o)ϵ�½��Д�(sh��)�W(xu��)ģ�ͣ���d�S�c�p��늙C���Ӵ�朦�s�غϣ���D2��ʾ��
���ӂ�(c��)ȡ�l(f��)늙C�T�����D(zhu��n)�ӂ�(c��)ȡ늄әC�T�����ɵðl(f��)늙Cϵ�y(t��ng)����[1-3]��
ʽ�У�uds��uqa,udr,uqr���������D(zhu��n)��d��q�S늉���
Us����늾W(w��ng)늉�ʸ����ֵ��
ids,iqs,idr,iqr���������D(zhu��n)��d��q�S�����
��ds,��qs,��dr,��qr���������D(zhu��n)��d��q�S��朣�
��s�������Ӵ��?zh��n)�����ֵ�?/DIV>
��1����ͬ�����ٶȣ�
��r�����D(zhu��n)f늴Ž��ٶȣ�
Rs,Re���������D(zhu��n)�ӵ�Ч��裻
Ls,Lr,Lm���������D(zhu��n)�ӵ�Ч�Ըкͻ��У�
Te,Tm����늴����غ͙Cе���أ�
J�����Sϵ�y(t��ng)�D(zhu��n)�ӑT����
Np����늙C�O����(sh��)��
��m�����D(zhu��n)���D(zhu��n)�٣���m=��r��np��
���Զ�����艺������ʽ(2)��(4)��(5)��������ʽ(3)�ã�
|