����DSP��׃�l�㉺��ˮģ������ϵ�y(t��ng)��(y��ng)��
����(hu��)��1���S�´�2����Ԫ3
(1���A���칤�I(y��)�W(xu��)Ժ�C(j��)е����ϵ���ӱ��ȷ�065000��2����I�I(y��)��W(xu��)��
�������71 0068��3��ʯ�ͼ��F(tu��n)�|������������̽����؟(z��)�ι�˾���ӱ�����072751)
ժҪ��������׃�l�㉺��ˮϵ�y(t��ng)���о��F(xi��n)��O(sh��)Ӌ(j��)��һ�N�˔�(sh��)����̖(h��o)̎����(DSP)��ģ���剺��ˮϵ�y(t��ng)����B��ԓϵ�y(t��ng)��ܛ��Ӳ���Y(ji��)��(g��u)�������˺㉺��ˮϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�ͣ��о���ģ��PID������Փ�ں㉺��ˮϵ�y(t��ng)���đ�(y��ng)�á��ڴ˻��A(ch��)��Ӌ(j��)��һ�NĿ�m��(y��ng)ģ��PID����������ԓģ����������(y��ng)����׃�l�㉺��ˮ��ģ������ϵ�y(t��ng)������MATAB����T�߷����� PID�����㷨��ģ�������㷨����������m��(y��ng)ģ��PID�����㷨������Y(ji��)������ʹ�����m��(y��ng)ģ��PID���Ƶĺ㉺��ˮϵ�y(t��ng)�ķ�(w��n)�����^�����ɷN�㷨��(y��u)Խ��
�P(gu��n)�I�~��ģ��PID��׃�l�㉺����(sh��)����̖(h��o)̎����
�ЈD���̖(h��o)��TM 921 51�īI(xi��n)��(bi��o)־�a��A���¾�̖(h��o):1673-6540(2010)05-0016-05
0 ����
׃�l�{(di��o)����һ�(xi��ng)��Ч�Ĺ�(ji��)�ܽ��ļ��g(sh��)���九(ji��)��ʸߣ��܌����O(sh��)Ӌ(j��)���������׃�������M(f��i)�Ĵ���ܶ���(ji��)ʡF��(l��i)�������{(di��o)�پ��ȸߣ����ʌ���(sh��)�ߵ����c(di��n)[9].��(gu��)��W(xu��)���磺����(gu��)��K��E Lansey��RobertDemoyer Jr��L E Ormsbee��Ӣ��(gu��)��FI��SPowet����B��Coulbeck��P Jowitt���ձ���KazumasaMuguruma��M��Tuskiyama����ɫ�е�U Shamir��c D D fioward����Ҳ�ڹ�ˮϵ�y(t��ng)��ģ��Փ���M(j��n)�����S�������̽ӑ����׃�l�㉺��ˮϵ�y(t��ng)�����܃�(y��u)���ṩ����Փ����(j��)[1-3]����(gu��)��(n��i)�в��ٹ�˾����׃�l�㉺��ˮ�Ĺ��̣����˶���Ç�(gu��)���׃�l������ˮ�õ��D(zhu��n)��[4]��ˮ�ܹܾW(w��ng)�������]�h(hu��n)�{(di��o)��(ji��)�����_(t��i)ˮ�õ�ѭ�h(hu��n)���ƣ��еIJ��ÿɾ���߉������(PLC)���Ԍ�(sh��)�F(xi��n)���еIJ��Æ�Ƭ�C(j��)������(y��ng)��ܛ�����Ԍ�(sh��)�F(xi��n)������(j��)��(gu��)��(n��i)�����ں㉺��ˮ������о��M(j��n)չ���g(sh��)�������һ�N���ڔ�(sh��)����̖(h��o)̎����(DsP)��ģ���㉺��ˮϵ�y(t��ng)���O(sh��)Ӌ(j��)�����m��(y��ng)ģ������������(y��ng)��simulink����ܛ����(du��)�������m��(y��ng)ģ���������cPID��������ģ���������ă�(y��u)�����c(di��n)��
l �㉺��ˮϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��)
1��1 ϵ�y(t��ng)Ӳ���Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
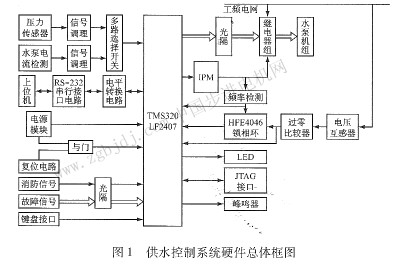
��TMS320LF2407AоƬ����ģ�����U(ku��)չ�������Ĺ���ģ�K����(sh��)�F(xi��n)�����¹��ܣ�������̖(h��o)�z�y(c��)��ˮ�������̖(h��o)�z�y(c��)�����l늉��c׃�l��ݔ��늉����l�ʺ���λ�ęz�y(c��)��D��A�D(zhu��n)�Q���^������ơ�ͨ�š��I�Pݔ�롢Һ���@ʾ���U(ku��)չ�ӿڼ����ψ�(b��o)����ϵ�y(t��ng)Ӳ�����w��D��D1��ʾ��
1��2ϵ�y(t��ng)����ԭ��
��ԓ�㉺��ˮϵ�y(t��ng)�У�����������ˮ�w��(n��i)��
2 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
2��1 ϵ�y(t��ng)�����̈D�O(sh��)Ӌ(j��)
ԓϵ�y(t��ng)�У���(sh��)��(j��)(������̖(h��o)���l늾W(w��ng)��늉���늙C(j��)����O(ji��n)����̖(h��o))�ɼ����I�Pݔ�롢Һ���@ʾ�����{(di��o)�������W(w��ng)��Fuzzy��PID���Ƽ��i��h(hu��n)ͬ���ГQ���ƶ�Ҫ��ܛ��Ӳ������ϲ��܌�(sh��)�F(xi��n)��ϵ�y(t��ng)��������ɵĹ����У�ϵ�y(t��ng)��ʼ������(sh��)��(j��)�ɼ����^��LED��ʾ���I�P���衢����̎���������]�h(hu��n)���ơ��i��h(hu��n)ͬ��l�ГQ���Ƶȡ���������������D2��ʾ��ǰ�ˉ�����������Ɍ�(du��)ˮ���Ĕ�(sh��)��(j��)�ɼ�����ˮ�����D(zhu��n)�Q��늉�ֵ����(j��ng)�^(gu��)��̖(h��o)�{(di��o)���·���M(j��n)��A��D
�D(zhu��n)�Q�����D(zhu��n)�Q�Y(ji��)���͵�DSP��(n��i)����(j��ng)̎�����c�A(y��)�O(sh��)��ˮ���M(j��n)�б��^�õ��`���ԓ�`�����cǰһ�`�����ֿɵõ��`���׃����e��e��e����ģ����������ݔ�룬��ܛ���еİ��{(di��o)����������Fuzzy��PID�����㷨�ӳ����M(j��n)��̎����ͨ�^(gu��)DsP���ÿ��gʸ���}���{(di��o)��(sVPwM)�㷨��(l��i)���ƣ��ٌ�ģ����������ݔ����(j��ng)�����D(zhu��n)�Q���l�ʣ�f��׃��ݔ������(y��ng)�l�ʣ��ö��{(di��o)��(ji��)ˮ��늙C(j��)���D(zhu��n)�١���(d��ng)DsP�z�y(c��)����׃����ݔ���l�ʽӽ����l늾W(w��ng)�l�ʕr(sh��)����ʹ���i��h(hu��n)�M(j��n)����λ�ęz�y(c��)��ۙ����(d��ng)����ͬ��λ�r(sh��)�����i��h(hu��n)�l(f��)������λ�i����̖(h��o)�|�l(f��)�Д࣬DsP�����_(t��i)ˮ����׃�l�\(y��n)�Р�B(t��i)�ГQ�����l�\(y��n)�Р�B(t��i)��������(j��)��(d��ng)ǰˮ���ж��Ƿ���һ�_(t��i)ˮ��Ͷ��׃�l�\(y��n)�Р�B(t��i)��
2��2 Fuzzy-PID�����㷨�ӳ����O(sh��)Ӌ(j��)
ԓ������Ҫ��(sh��)�F(xi��n)�ɘ�ϵ�y(t��ng)��ݔ�����õ���(d��ng)ǰ�Č�(sh��)�Hˮ����ԓˮ���c�����O(sh��)��ֵ���p���ɵõ���(d��ng)ǰ�`������ԓ�`�����cǰһ�`�������p�ɵõ��`���׃�������`����`���׃����(j��ng)�^(gu��)ģ��������׃���`����`���׃��ģ���Ӽ��Ļ���Փ���е�ֵ�����ɲ�ԃģ�����Ʊ����õ�ģ������������ģ�����������������ģ���Ӽ��еĻ���Փ����ֵ����횳��Ա����W(w��ng)��׃�Ɍ�(sh��)�H�������������ͽoģ��(sh��)�D(zhu��n) |