�oˢֱ��늙C���}���{���µ��D���}������
�Ϲ₥����䣬 �ܺ�
(��܊���̴�W늚��ϵ��������h430033)
ժҪ�������oˢֱ��늙C(BLDcM)���B�Q���D���}���c�D�ٵ��Pϵ���_���Q��І��c늘��������늄�֮�g���Pϵ�������}��ͱ��(PwM)��ʽ��i������B������ͨBl��cM����ϵ�y��Ӱ푣��������PwM ON��PwM(ǰ30���ͺ�30���M��PwM���ƣ����g60�����ֺ�ͨ)��ʽ�µ��D���}���a�����ơ�ԓ���Ʋ����܉���ȫ�����ǓQ�����������P��Ͱ���F���l�������늴��D���}�ӣ�߀�܉���ȫ�a�����ړQ���������D���}�ӣ����F늙C�ڵ��ٺ��ٕr�ğo�D���}�ӿ��ơ�
�P�I�~���oˢֱ��늙C���D���}�ӣ��}���{���ЈD���̖��TM 33�īI��־�a��A���¾�̖
0 ����
�oˢֱ��늙C(Bmshless Dc M0tor��BLDcM)����Y�����Ρ��{�����ܺá������ܶȸߡ����������ƺ��ε����c���õ���Խ��Խ�V���đ��á��������β���늄ӄ�(ƽ플��ȡ�120��)BLDcM�D���}�ӵ����Ƽ��������ܵĸ���һֱ���о��ğ��c��
BLDcM���Թ����ڸ��N�}���{��(Pulsewidth M0dulaLion��PwM)ģʽ�£���ͬ��PwMģʽ������Ӱ푹����_�P�ܵĄӑB�p���cɢ������ԣ����Ҍ��D���}�ӵ�Ӱ�Ҳ�ܴ�ͨ�^��׃ֱ��ĸ���ز����ơ������ַǓQ��������ĺ㶨������Ч���ƓQ���D���}�ӣ�����ʹ���ؓ�Y�����s�����ٕr��ͨ�^���ƷǓQ��������Ĵ�С���{���Q���D���}��[4]���īI[5]�Hᘌ�PwM ON��ʽ���D���}�ӵ�Ӱ��M�з������īI[6��8]��늙C��ͬ�ٶȅ^���ò�ͬ�ēQ���D���}�����Ʒ�������δ���]PwM��ϵ�y��Ӱ푡��īI[9һ12]�����A�y������ơ��W�j���ơ��Կ��_���Ƶȁ������D���}�ӣ������㷨���s�������ڌ��F��
ᘌ�BLDCM�ēQ���^�̣��Լ�PwM������ϵ�y��Ӱ푣������ڱ���PwMһ0N��PwM�������ܵĻ��A�ϣ���늙C���١����ٕr��ͨ�^���Q�����gPwM�{�Ʊȵ���ȡ��������ڲ�ͬ�ٶȕr�ēQ���D���}���a�����ƣ���ԭ���ؓ�Y����׃�Ļ��A�ϣ���������ϵ�y�Ŀ������ܣ�����ڌ��F��
1�Q���^�̷���
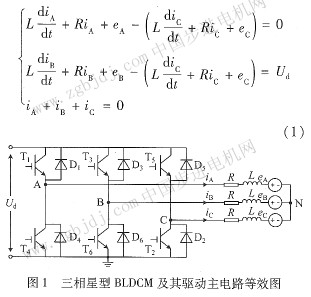
�OBLDcM�������Q�������B�ӣ�����늘з�������Ӌ�u���ʹŜ��p�ģ��t���Ч�·���������·��D1��ʾ���D�У�R��L�քe�����@�M����늸У�eA��eB��eC�քe�������@�M�ϵķ�늄ӄݡ���늙C��������������B120����ͨ��ʽ�r������늘��@�M늸е�Ӱ푣�����Q���˲�r��ɵģ������_����T1��T2��ͨ׃��T2��T3��ͨ�����·��B��A��c�����@�M��ͨ�ГQ��B��c�����@�M��ͨ�����������Q���^�̡��ړQ���^���У�A�������D4�m������u�pС��0��B�������u�����_�����Bֵ���Q���^�̵��·���̞�
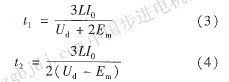
���]늙C�����@�M�ķ�늄ӄݞ�ƽ플��ȡ�120��늽Ƕȵ����β�����ֵ��Em,�t�Q���^���У�eA=eB=һeC=Em���cBLDcM���@�M�r�g����L��R��ȣ������J��PwM���������С���t��|Rix|=|LdiX��dit|��X=A��B��c���ɺ���늘��@�M����Ӱ�[6]�������]��������ij�ֵ�ͽKֵ��Q��ǰ�������ķ��BֵI0����ʽ(1)�ɵÓQ�����g�ĸ��������
��ʽ(2)�ɵã��Q�����gA���@�M���P���r�gt1��B���@�M���_ͨ�r�gt2�քe��
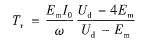
�O�D�әCе���ٶȞ�أ��t�Q�����g��늴��D�؞�
��ʽ(2)��(5)��֪��
��Ud>4Em�r����늙C�D��С��һ��ֵ�r����������Q���ͬ�r��ɣ���iA����0֮ǰ��iB���_�����Bֵ����D2�ГQ������I���ғQ�������D�����ӣ��D���}�Ӟ�
��Ud=4Em�r����늙C��һ���D�����\�Еr�������@�M�ēQ�����ͬ�r��ɣ���iA����O��ͬ�riB�_�����Bֵ����D2�ГQ�������ғQ���^�����D�ر��ֺ㶨����ֵ���ڷǓQ���چ���늴��D�أ� ��Ud<4Em�r����늙C�D�ٴ���һ��ֵ�r����������Q���ͬ�r��ɣ���iA�ѽ���0�r��iB߀�]���_�����Bֵ����D2�ГQ������ |