���ڻ\�ͮ���늙C(j��)�ĵ��F����ԇ�ƽ�_�о�
����1������1�����ı�2
��1���|�ϴ�W(xu��)늚�̌W(xu��)Ժ���Ͼ�210096��2�Ͼ�������W(xu��)�������̌W(xu��)Ժ���Ͼ�210094��
ժҪ��ᘌ����F����ԇ��Ҫ������ˡ��p��׃��늙C(j��)���Y(ji��)��(g��u)�ĵ��F����ԇ�ƽ�_�O(sh��)Ӌ���������ڻ\�ͮ���늙C(j��)�������D(zhu��n)�Ӵň�����ʸ�����Ʒ�����������matlab/simulink�h(hu��n)���µĵ��F����ԇ�ƽ�_����ģ�ͣ����M(j��n)���˵��F��܇�����^�̺��Ƅ��^�̵ķ��档����Y(ji��)����C���O(sh��)Ӌ��������Ч�Ժ����_�ԡ�
�P(gu��n)�I�~���p��׃��һ늙C(j��)���\�ͮ���늙C(j��)���D(zhu��n)�Ӵň������棻�������Ƅ�
�ЈD���̖��tm343; tp271+4 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848( 2010) 06-0082,-03
0�� ��
�S���҇����л������IJ���ӿ죬�����˿�Ҏ(gu��)ģ������Û���Թ���������܇������Ă��y(t��ng)���й�����ͨ�����Ѳ�����ؓ(f��)����ˣ������\(y��n)�����ٶȿ졢ռ���١���ȫ�ɿ�����(zh��n)�c(di��n)�ʸߡ��������m���Gɫ�h(hu��n)���ȃ�(y��u)�ݵĵ��Fһ��(j��ng)���F(xi��n)������ˇ���(n��i)�����г����ƽ���й�����ͨ�y�}��ּ�x�����F��܇����һ�N������ӄ�܇�M������������ӷ�ʽ�팍�F(xi��n)��ܙC(j��)е�ܵ�׃�Q�����f�ġ��L���ԁ������F����Ҫ����ֱ�����ӷ�ʽ��Ȼ�����S��������������������ʸ�������㷨�Լ����P(gu��n)���g(sh��)�İl(f��)չ������늙C(j��)�Ŀ��������ѽ�(j��ng)�����cֱ��늙C(j��)����������������й����ܶȸߡ��ɱ��͡��ɾS�o(h��)�Ժá��ܭh(hu��n)���ƼsС��ֱ��늙C(j��)�]�еă�(y��u)�c(di��n)����������ʹ�ý���������ȡ����ֱ�������ڵ��F�е�����(d��o)��λ�����F��܇����һ�N���ʽ�������ϵ�y(t��ng)������ʽͶ��֮ǰ�����M(j��n)�и��Nԇ���˽�ϵ�y(t��ng)�c�����������Լ��c�ⲿ�h(hu��n)������P(gu��n)ϵ�������Nԇ�x���_���ʽ�������ԇ�ƽ�_��
Ŀǰ������(n��i)�Ĵ��ʽ�������ԇ�ƽ�_�ɷ֞�ɷN��һ�N�Ǻ����ͣ���һ�N�������͡�ǰ�����ڱ�ԇ늙C(j��)�S�ˌ���һֱ���l(f��)늙C(j��)��ֱ���l(f��)늙C(j��)���S�˽����ԆT�d��ͨ�^�{(di��o)��(ji��)ֱ���l(f��)늙C(j��)�Ą��늉����{(di��o)��(ji��)��ݔ���D(zhu��n)�ء���ֱ���l(f��)늙C(j��)�l(f��)������y�Ա��������á��@�N���M(f��i)�ڵ��F�@�ӵĴ���ϵ�y(t��ng)�������(y��n)�ء��������ڱ�ԇ늙C(j��)�S�ˌ���һ����ֱ���l(f��)늙C(j��)һֱ��늄әC(j��)����ͬ���l(f��)늙C(j��)��(g��u)�ɵ���������ϵ�y(t��ng)�������ͬ���o늾W(w��ng)��ͨ�^�{(di��o)��(ji��)ؓ(f��)�d늙C(j��)�M���������늉����{(di��o)��(ji��)��ݔ���D(zhu��n)�أ����S��ͬ���l(f��)늙C(j��)���l�ʷ�(w��n)�����@�Nԇʽ���Ʒdz���(f��)�s���ɱ����F����ֱ��늙C(j��)�Ĵ���Ҳ����r늙C(j��)�����\(y��n)�й��r��ԇ���⣬�������M(j��n)�д���ԇ�r�������^������������
���Ļ���matlab/simulink r2007a��(g��u)����һ�N���p��׃��늙C(j��)���Y(ji��)��(g��u)�ĵ��F����ԇ�ƽ�_��ԓƽ�_��ԇ���ֲ����˻\�ͮ���늙C(j��)���˷��������ɷN���y(t��ng)��������ԇ�ƽ�_����ֱ��늙C(j��)�����ķN�Nȱ�c(di��n)�������������ĵ͡��{(di��o)�ٷ����V�ȃ�(y��u)�c(di��n)�����M(j��n)�и��Nԇ��ṩ�˱�����
1���F����ԇ�ƽ�_�Y(ji��)��(g��u)��ԭ��
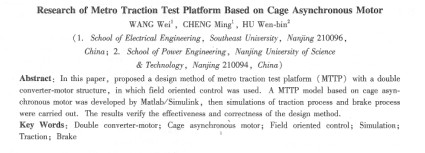
���F����ԇ�ƽ�_��ϵ�y(t��ng)�Y(ji��)��(g��u)��D1��ʾ����ֱ���Դdc��׃����inv1��inv2������(y��ng)�Ŀ�����ctr1��ctr2����ԇ늙C(j��)m1��ԇ늙C(j��)m2�M�ɣ�����m1��m2�鮐��늙C(j��)��m1�����p¶�]�h(hu��n)���ƣ���h(hu��n)���D(zhu��n)�٣���(n��i)�h(hu��n)���D(zhu��n)�أ���ģ�M���H���F��܇�Ġ����b��m2�����D(zhu��n)���]�h(hu��n)���ƣ�ģ�M���F��܇�\(y��n)���^������������ؓ(f��)�d��
�����f�����F����ԇ�ƽ�_�Ĺ���ԭ�����ڴ���һЩ��̖�ϵļٶ����ٶ�inv1��inv2ݔ���Ľ�����l�ʷքe�飬f1��f2��m1��m2���S���D(zhu��n)�������ĵ�Ч�l�ʞ���ͨ�^ctr1��ctr2��inv1��inv2ʩ�Ӳ�ͬ�Ŀ��Ʋ��ԁ�����f1��f2��������С��
����m1���D(zhu��n)���l��
m2���D(zhu��n)���l��
����(j��)����늙C(j��)�Ļ�������ԭ������(d��ng)�D(zhu��n)���l�ʴ�����r������늙C(j��)̎��늄әC(j��)�\(y��n)�Р�B(t��i)����(d��ng)�D(zhu��n)���l��С����r������늙C(j��)̎�ڰl(f��)늙C(j��)�\(y��n)�Р�B(t��i)����(d��ng)��Ҫģ�M���F��܇�����^�̕r��ͨ�^ʩ��һ���Ŀ��Ʋ��Ա�Ȼ����f1��f2֮�g������f1>0����f2<o���Ķ������Ƶ�m1̎��늄әC(j��)�\(y��n)�Р�B(t��i)��m2̎�ڰl(f��)늙C(j��)�\(y��n) |