�C�ϴ����Դ������Ϣ�ںϼ��g�о�
�n���x112���S�(zh��n)��1����|��2
��1����W늚��c�Ԅӻ����̌WԺ�����300072,2����x���о��������300131��
ժ Ҫ��������˽�(li��n)�T����cps��������Ӌ�̃x���_�mc�ȶ��������O��ľC�ϴ���?q��)���ϵ�y(t��ng)�У�ᘌ���Ҏ(gu��)�ğo����(li��n)��V�����L�r�g�����������������Ƚ��ͺ͞V�����l(f��)ɢ�Ć��}���ԏB���H�����п������V����ϵ�y(t��ng)�������y���y(t��ng)Ӌ����Ҫ��ľ����ԣ������˾ֲ�����У���ğo����(li��n)��V���Y�����OӋ�˻����ա��V���ľֲ�����У���o����(li��n)��V�����������䑪���ھC�ϴ����Դ������Ϣ�ں�ϵ�y(t��ng)�С������������������h���V���ľֲ�����У���o����(li��n)��V����������Ǻ�λ�õĹ�Ӌ���ȶ����ڳ�Ҏ(gu��)�ğo����(li��n)��V���������и��õČ��H���Ãrֵ��
�P�I�~���C�ϴ���h���V������Ϣ�ںϣ�(li��n)��V��
�ЈD���̖��tp 273 �īI���R�a��a
1����
��ǰ��������ϵ�y(t��ng)�ѽ�(j��ng)�Ćμ��ṩ������(sh��)��(j��)�l(f��)չ��ͨ�^�W(w��ng)�j���g�c��Ϣ�ںϼ��g�ṩ���ӻ��Č���ģʽ�Ϳ��ƹ��ܣ��γ��˴��������c�{�ع���һ�w���ľC�ϴ���ϵ�y(t��ng)��
Ŀǰ���N������λ�O���c���g�İl(f��)չ�ѻ���څ�ڷ�(w��n)�������y����ȵ����ij�N��һ������λ�O��ľ��ȡ������ö���������Ϣ�ںϼ��gȡ�L�a�̾C�ϰl(f��)�]���N�����O�����c������ߌ���ϵ�y(t��ng)�����w���ȺͿɿ��ԣ�Ч��ʮ�����@��
Ŀǰ�V�����ü��п������V��������ڿ������V����(li��n)��V�������M����Ϣ���ں�̎����ǰ�ߴ��������r�Ժ����e�Բ�Ć��}�����ߞ��˱��C���õ����e���ܶ���������ϵ�y(t��ng)�M��У���Ķ��pʧ��ϵ�y(t��ng)�ľ��ȡ����IJ��þֲ�����У���o����(li��n)��V�����Y����ͬ�r��h���V�����������У����ɻ���h���V���ľֲ�����У���o����(li��n)��V������ԓ�V����������ϵ�y(t��ng)���e�ԣ�ͬ�r���и��ߵľ��Ⱥ��õ������ԡ�
2����h���V���ľֲ�����У���o����(li��n)��V�����Y��
��(li��n)�T��ϵ�y(t��ng)( sins)�^�ߵ��ԃr�ȣ������鴬���Ļ�������ϵ�y(t��ng)��ͬ�r���cps������(bd)��������Ӌ�̃x( dvs)���_�mc(loran c)�Ȍ����x�������o������ϵ�y(t��ng)�����ɵ��㺽��Ҫ��ĸ��ԃr�ȴ�������ϵ�y(t��ng)��
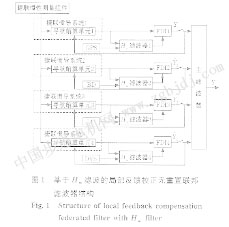
��(li��n)�T��ϵ�y(t��ng)( sins) ���Կ������ɽ�(li��n)�T�Ԝy���M��(imu)�͌��������Ԫ(nc)���ɵġ�����h���V���ľֲ�����У���o����(li��n)��V������h���cncҕ��sins��2�������M�ɲ��֣������V��������һ����(li��n)�T�Ԝy���M�������ɂ����������Ԫ�����Ҍ���(li��n)�T�Ԝy����Ԫ���鹫������ϵ�y(t��ng)��ÿһ��������ϵ�y(t��ng)��ݔ���քe�cһ�����������Ԫ������ݔ��һ�𘋳��ӞV���������y��ÿ���ӞV������h���V���\�㪚���ز����\�У�����ÿ���ӞV���������÷���У����ʽ�����Ԍ��������Ԫ���`���M�����������������Ľ�(j��ng)�^����У���Č��������Ԫݔ���Č�������(sh��)�Ǿֲ�****�ģ����@Щ�ֲ�****�Č�������(sh��)ݔ�뵽���V�����У�ͨ�^���V�����õ���������(sh��)��ȫ�ֹ�Ӌ���V�����Y������D1��ʾ��
����h���V���ľֲ�����У���o����(li��n)��V������ͨ�^����������(sh��)�����ľֲ�****��Ӌ�M����Ϣ�ںϣ��Ķ�ֱ�ӵõ���������(sh��)������ȫ�ܹ�Ӌ�����ccarlson����ğo����(li��n)��V�����ګ@�Ì�������(sh��)��ȫ�ֹ�Ӌ;����������������߶����ڵõ��ֲ�****��Ӌ�ėl����ͨ�^****�ә���С���˹�Ӌ���õ�ȫ�ֹ�Ӌ�����ڃ��ߵõ��ֲ�****��Ӌ���õ����y��Ϣ��ͬ���Ҿֲ�****��Ӌ��ȫ����Ϣ�ںϵ�****�Ԝʄt��ͬ�������ϵ�y(t��ng)ģ�͜ʴ_����r�£�����h���V���ľֲ�����У���o����(li��n)��V�����͟o����(li��n)��V�������õ��Č�������(sh��)��ȫ�ֹ�Ӌ�ľ��ȑ�ԓ���ஔ?sh��)ġ�Ȼ��������ϵ�y(t��ng)�Ġ
�̾������һ�A���Ƶ��`��ģ�ͣ��ʟo����(li��n)��V��������ϵ�y(t��ng)�Ġ�B(t��i)���̌����S�r�g�����ƶ�څ�ڲ��ʴ_���Ķ�ʹ���ӞV�����õ��ľֲ�****��Ӌ�ľ����½���ͬ�r�����ڿ������V��Ҫ��ϵ�y(t��ng)�������y������������]���ںܶ����H������ϵ�y(t��ng)�������y����һ�������������ģ�ͽ�ģ���^���y������ģ�ʹ��ںܴ���`��˕r�ҡ��V���������Ԍ��õ���ֵ��w�F(xi��n)����˻���h���V���IJ�����У���o����(li��n)��V�����ڱ��Cϵ�y(t��ng)�����e���ܵ�ͬ�r���и��ߵľ��Ⱥ������ԡ�
3����h���V���ľֲ�����У���o�� |



