�����ؓ(f��)�����Ļ��ʽ���M(j��n)늙C(j��)����ϵ�y(t��ng)�о�
����������
���������I(y��)��W(xu��)����710072)
ժҪ����B��һ�N��(y��ng)���ڻ��ʽ���M(j��n)늙C(j��)�Ŀ���ϵ�y(t��ng)��ԓϵ�y(t��ng)�Զ�����ʽ���M(j��n)늄�(d��ng)�C(j��)���o�B(t��i)�̈́�(d��ng)�B(t��i)�\(y��n)�����Ԟ���l(f��)�c(di��n)����Ҫ�ɿ����·��߉�ϳ��·��pwm���{(di��o)���·�������(q��)��(d��ng)�·���^�����o(h��)�·�����ؓ(f��)�����·�����ֽM�ɡ���ϵ�y(t��ng)�Ԇ�Ƭ�C(j��)at89 c51����ƺ��ģ���(sh��)�F(xi��n)�������D(zhu��n)�\(y��n)�С��^�����o(h��)�����ؓ(f��)�������ܡ�ᘌ�(du��)���M(j��n)늙C(j��)�S���l�����ߎ��d�����½������c(di��n)��ϵ�y(t��ng)ͨ�^�����^�����o(h��)�������ֹؓ(f��)�����ȴ�ʩ��ʹϵ�y(t��ng)�Ď��d����������ߡ�
�P(gu��n)�I�~�����M(j��n)늙C(j��)����Ƭ�C(j��)�������ֹؓ(f��)����
�ЈD���̖(h��o)��tm383. 5 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010)07-0061-03
o�� ��
��ϵ�y(t��ng)���Æ�Ƭ�C(j��)��pwm����оƬ�Ϳɾ���߉оƬ���Y(ji��)��(g��u)��(ji��n)�Σ��ɱ����������^�����o(h��)�·�����ؓ(f��)�����·���C�\(y��n)�еİ�ȫ�������ϵ�y(t��ng)�ľ��l���ԡ�
�����ĺ����(q��)��(d��ng)��ʽ�Ĺ��늉���늙C(j��)�~��늉��ߵö࣬ʹ�@�M���������˥�p�ٶȺܿ죬ͨ�^�ز���ʽʹ늙C(j��)�@�M����ڵ��ٵ������\(y��n)�з�����(n��i)���ֺ�������Ķ�����늙C(j��)ݔ���D(zhu��n)�غ㶨��
���Ǵ���һЩȱ�c(di��n)����·�^��(f��)�s�������\(y��n)�Еr(sh��)�@�M����_����ʹ���l�a(ch��n)����ʎ���\(y��n)�в�ƽ��(w��n)������λ���ț]����ߵȡ�
l ϵ�y(t��ng)�M��
������ϵ�y(t��ng)������������ʹ��������������@�M������Ժ㶨���Ҳ��S늙C(j��)���D(zhu��n)�ٶ�׃�����Ķ����C�ںܴ���l�ʷ�����(n��i)늙C(j��)����ݔ���㶨���D(zhu��n)�أ����ýy(t��ng)��ᘌ�(du��)������ʽ���M(j��n)늙C(j��)���O(sh��)Ӌ(j��)�����ڌ�늉�������(n��i)��(du��)���M(j��n)늙C(j��)�M(j��n)���(q��)��(d��ng)�Ϳ��ơ�
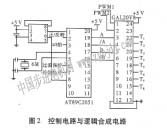
ϵ�y(t��ng)������(g��)���ֽM�ɣ������·��߉�ϳ��·��pwm���{(di��o)���·�������(q��)��(d��ng)�·���^�����o(h��)�·�����ؓ(f��)�����·��ϵ�y(t��ng)��D��D1��ʾ��ϵ�y(t��ng)�����ⲿ��̖(h��o)֮���Ƭ�C(j��)ݔ����·������̖(h��o)���@��·��̖(h��o)��sg3525ݔ���ă�·pwm������(j��ng)�^gai20v8�M�ϣ������Ƹ����ʹܵ��_ͨ�c�P(gu��n)�ࡣ
1.1�����·
�����·��Ҫ�Ɇ�Ƭ�C(j��)at89c2051��(g��u)�ɡ������·�����ⲿ�������D(zhu��n)���}�_��̖(h��o)��4/8���ГQ���^�����o(h��)��̖(h��o)��(j��ng)�^��늸��x��քeݔ������Ƭ�C(j��)��p3��o��p3. 3��p3.1��p3.2�ڣ���(j��ng)�^̎��ݔ��a����a��b��/b 4·��̖(h��o)������a��/a����a���@�M���˺�ؓ(f��)�˹��ʘ������̖(h��o)��b�ʹ���b���@�M���˺�ؓ(f��)�˹��ʘ������̖(h��o)��
1.2߉�ϳ��·
߉�ϳ��·��Ҫ��gal20v8b�M�ɣ�����pwm���{(di��o)���·ݔ���ă�·���a(b��)��pwm��̖(h��o)�c�����·�a(ch��n)���Ŀ�����̖(h��o)�C��̎�����a(ch��n)��8·h�������̖(h��o)����߉�ϳ��·�a(ch��n)���İ�·��̖(h��o)��(j��ng)�ɷ�����ݔ���������(q��)��(d��ng)�·���ɰ˂�(g��)mosfet�M�ɵăɂ�(g��)h�����·��߉�ϳ��·�Ŀ�D��D2��ʾ��
1.3 pwm���{(di��o)���·
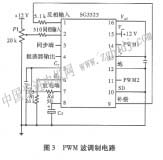
pwm���{(di��o)���·���ü����}���{(di��o)����( sc3525)��(sh��)�F(xi��n)�ز������̖(h��o)������t�������r(sh��)�Ĕز��l�ʺ����^(q��)��С�ɽ���5��6��7���_�ϵ�ct��rt��rd��ͬ�Q������ʽ�飺f= 1/ct��0.7rt+ 3rd����ͨ�^�{(di��o)��(ji��)2�_��ͬ��ݔ��ˣ��ϵ��λӋ(j��)pl���{(di��o)��(ji��)pwm����ռ�ձȣ��Ķ�ݔ����·���a(b��)�ĆΘO��pwm��̖(h��o)�����·��(g��u)����D3��ʾ��
1.4�����(q��)��(d��ng)�·
�����(q��)��(d��ng)�·����Ƭir2110�(q��)��(d��ng)оƬ�������@��Ƭir2110�(q��)��(d��ng)оƬ�(q��)��(d��ng)��8ֻ���lcmos���ʈ�(ch��ng)Ч��(y��ng)���w�ܽM�ɵăɂ�(g��)h���ʘ�(g��u)�ɡ���߉�ϳ��·ݔ��İ�·������̖(h��o)�քe����8ֻcmos�ܵ��_ͨ���P(gu��n)�࣬ݔ������·��̖(h��o)�քe�ӵ�������ʽ���M(j��n)늙C(j��)�ă����@�M����ؓ(f��)�ˣ���(sh��)�F(xi��n)������ʽ���M(j��n)늙C(j��)���ķNģʽ�����D(zhu��n)�����\(y��n)�С����D(zhu��n)�벽�\(y��n)�С����D(zhu��n)�����\(y��n)�кͷ��D(zhu��n)�벽�\(y��n)�С�
1��5�^�����o(h��)�·
�^�����o(h��)�·��Ҫ���\(y��n)��Ŵ�����늉����^����(g��u)�ɣ���D4��ʾ���ɲɘ����Á��@�M�ϵ���̖(h��o)����(j��ng)�Ŵ�Ȼ�����(bi��o)��(zh��n)� |