����Magnet�ğoˢ������řC˲�B���Է����о�
�R�Ժɣ�����A
(�������պ����W������100083)
ժҪ�����ں��ս����Դ�н�����řC�����D늘�ʽ�Y��������Ԫ늴ŷ������о��^�١������Դ˞��о������U������Magnetܛ���������S˲�B�\�ӈ�����ģ�͵�ԭ���Ͳ��E���������˽�����řC�ڿ��d���r�µĴň����g�ֲ���늴Ņ������·������ͨ�^���y���ȣ��C��ģ�͵Č����ԣ�ԓģ�Ϳ�ָ��ԓ���늙C�ĽY�������OӋ���������r˲�B�����о���
�P�I�~���oˢ������řC�����S˲�B�\�ӈ�������Ԫ��Magnet
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004��7018(20(18)08��0023һ03
0�� ��
����늙C˲�B�\�Еr�����ڶ����D���@�M֮�g�������\�Ӻ��O�D������ɵĴŲ����Q�ԣ�����늙C��늉�����ͨ���Ǻ��Еr׃ϵ�����ַ��̡����Mһ�����]��͵�Ӱ푣�����늸еķǾ��ԣ�늉�����Ҳ���ܳɞ�Ǿ����ַ���[1-2]�����D�ٺ㶨�Ҳ�Ӌ��͵�ǰ���£�ͨ�^d-q-0����-��-0������׃�Q���g�Ɍ�늉�����׃�Q�鳣ϵ�������ַ��̡����䑪���ܵ�ǰ��l�������ƣ����w���F�飺
(1)���O��늙Cģ�Ͳ��������H�ߴ��C����
(2)d��q�Sģ�����ɵ��ַ����dz���ϵ�����@Щ������늙C�D�ٺ��ٕr�Ǿ��Եģ����D��׃���r�s�ǷǾ��Եģ��������䑪�÷�����
(3)���늙C�c�������B�ӣ��t�����C�������Ӱ푣���늉��Ƿ����ҵģ��@�rd��qģ�͵�ǰ��l�����M�㣻
(4)���yģ�ͺ��y����ijһ���ϻ��_�P�IJ�ƽ���B�����磺��������ijһ���Ϯa���r��ϵ�y̎����ȷnj��Q�ԣ��@�rd��qģ�;Ͳ��ܑ��á�
1970�꣬Peter Silvester��M��v��K��cha ri������Ԫ������늴ň�Ӌ���У���ʹ���s�Y�������s߅��ͷǾ��Խ��|��r��߅ֵ���}�õ���𡣴�����īI��������Ԫ��������늙C���oˢֱ��늄әC���_�P����늙C�M�������P�о�[3-7]����Ŀǰ���ս����Դ�I���÷dz��V�������D늘�ʽ�oˢ������řC���о��s���٣���˱����Խ�����řC���о�������������Ԫ������˲�B�����M�з����о���
1 Magnetܛ����B
Ŀǰ����늴ŷ����I�����^��V����������Ans0R��˾��RMxprt��Maxwe�� 2D��3D�ͼ��ô�In��folytica��˾��Magnet��ǰ���ڸ��l늴ň�������ռ��������λ�����ڵ��l��늙C늴ň������У�ᘌ�������řC������Y������RMxprt���I늙C�OӋܛ���Л]�Ќ������OӋģ�K����ʹ��MMaxwell 2D��˲�B�\�ӈ���ģ�ܵ����ơ����߿��Ժܺõ؏��a���@Щ�ˣ���˱����x��Magnet��������Ԫ��ģ�ķ��湤�ߡ�
2����Ԫ������ԭ���c��ģ
����Ԫ���nj������^��ָ���S���С�Ć�Ԫ�������߅�熖�}��ԭ�푪����ÿ����Ԫ�У�ͨ�^�xȡ�m�����κ���ʹ��ÿ����Ԫ��Ӌ��׃�÷dz����Σ����^��ÿ����Ԫ���؏��Ժ���Ӌ�㣬����Y���C����������ɵõ������w��ꇱ��_�������^��Ľ⡣
����늙C�D�ӵ��D��ʹ��늸зǾ��ԣ������]��·��ͬF��r늉�����Ҳ�ʷǾ��ԣ�ÿ�r�̵ľW���ʷ��������ͬ����������řC���S���Q�ԣ���ʸ���ńݺ��@�M����ܶ�ֻ��z�S��������늙C���L���ȴ���0��3�r�����Ժ��Զ˲�©��ͨ��Ӱ푣������x����S˲�B�\��������������@��͵�늙C늴�˲�B���}���ɝM�㹤��Ҫ��
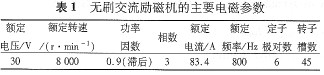
���ս������ٺ��l(cscF)�Դ�����D늘�ʽ������řC����Ҫ�������1��ʾ���҂�ͨ�^����Ԫ��ģ��������Y��������늴�˲�B���ܵ�Ӱ푣�������˲�B���������c���y��������Cģ�͵Č����ԡ�
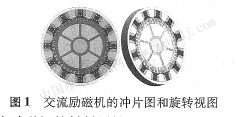
2��1������řC�ĎνY��ģ���OӋ
����ֱ���ھ������L��������řC�įBƬ�νY���D����D1��ʾ��Ҳ���ԏ�AutocAD��Pr0/E��cAnA�ȳ����L�Dܛ���Ќ����ģ�͡�
2��2������řC�IJ��ό���
���ڽ�����řC�Ķ��Ӻ��D�Ӿ�������ܛ�Ų��ϣ�������Ƕ�Є���@�M���D����Ƕ��늘��@�M�������ڶ����⚤���ò�ͬ�ڶ��ӴŘO���ϵĴ�ܗ��ʹ��ÿ����ͨ��·�ڌ����ڲ�ͬ늄ݕr�Ĵ��費ͬ��ͬ�r�ضȵ�׃��Ҳ�������Ǿ������Ӱ푡�ԓ늙C����ܛ�Ų����ڻ������ώ��Л]�У�������䓹��Ƭ�S��Dw310��35ֱ���Ż����Ա픵���͡�늙C���ò����փԡ��Ĕ��������x���������N��Ҫ���ϣ�
2.3������řC��߅��l���O��
��Ҋ��߅��l���x�������N��ʽ���������R(Dirichlet)߅��l�����Z����(Neumanm)߅��l�����@�ɷN߅��l���ĽM�ϡ�
�������R߅��l�������ń���ij��߅���ֵ�ǽo���ġ�����ȡ������řC�⚤̎�Ĵńݞ��㡣
�Z����߅��l�����_�γߴ�ͼ���Դ�Č��Q�ԡ�����������řC������6���O�����˜p��Ӌ����������ֻӋ��1��6�Y���Ĵńݣ����ಿ�ֿ����Ɍ��Q�ԁ��õ���
����������R���Z����߅��l���е�һ�㺯�������㣬�t߅��l���քe�������R�ε������R���R���Z����߅��l������Ӌ��6���O������řC��늴ň��r������ֻ�J����������һ���O�Ĵńݺ�늄ݣ����Ɍ��Q�Եõ�����늙C��늴ň��ֲ���
2.4������řC���D��늘��@�M�@�Ʒ�ʽ�OӋ
���˜p���������ϵ��攵���C����������řC�D���@�M�����p�ӯB�@60���������۾�Ǧ�=48�����Ot=3.75,��ÿ�Oÿ��ռ��1/4�ۡ���������@�M�����ù���y=3�Ķ̾��@�M����45���۵��ϡ���߅�ֳ����M���@�MA��B��c��ÿ���@�M��ɸ����@����֧·����l������늘��@�M�Ķ��x��D2��ʾ��
2.5������řC�����m���W���ʷ�
���ڶ����D�Ӳ����˯B�������Ԝp���˜u���p�ģ��@��������F����Ƭ�ĺ�ȿɳ����Ɣ�����ӡ��D�ӵįB��ϵ����O.92����Magnet�п��]�u���p�ĵ�Ӱ�Σ���ģ�r��Ч�F�įB�L=�F�įB�L���B��ϵ�����D��늘кͶ��ӄ���@�M�ļ��wЧ�����^С����ģ�r���ԡ����ښ�϶���֣����ń�׃�������Եȷֳ��Č��ʷ֣��D3a�����C�W���ʷֈD���D3b���϶̎�Ŵ�ľW���ʷֈD��
2.6������řC����������
������^���У�Ӌ��C������ǰ̎���^�����_�������픵��������������Y�c�ݺ���ֵ�Ĵ������̣�Ȼ���Ô�ֵ�ⷨӋ����ݺ����ڸ����Y�c��ֵ�������@һ�^��Ӌ�����ʹ惦������Ӌ��C���ٶȺ̓ȴ�Ҫ���^�ߡ�N��ton��Rapson���ͺ��ε������dz��õăɷN�Ǿ��Է��̽M�ĵ���������Newton-Rapson������һ�N�dz���Ч�Č��Ҷ�׃�������ľֲ��OС�c�㷨������������Tavlorչ�_������헣�����������һ�κͶ����֣����Դ����麯���Ľ��ơ��䃞�c���Ք��죬һ�㶼���_��ƽ���Ք�������������ʼ������Ҫ����^���̣�����Ҫ���ʼ�����ܿ������_ֵ�����Ք������⣬��߀Ҫ���fi(x)(i=l��2������n)�ĸ���ƫ��������ʹ��Newton��Rspson�������Ք��r�����Բ��ú��ε�����������ֻ�о����Ք��ٶȡ�
��������Newton��Rapson������Y�c�ݺ����ķǾ��Դ������̽M���O��NewžһRapson�����մΔ��O������20���`����ٷ�֮l���ݺ�������һ���ƶ��ʽ���Ք��ݶȞ�ٷ�֮10-6��
3늴ň���������Y������
�����У��O���������ֹ�r�g�ͷ��沽�L��������ʼ�r�g��O���Kֹ�r�g��2��5 ms���D��ÿ�D�^360��늽Ƕ����Õr1��25 ms����˾C�Ͻ���r�g�;��ȿ��]�����沽�Lȡ��O.0125 ms��Ӳ�����Þ飺In��tel(R)xeon(TM)3��2 GHz cPu��4��00 GRAM����ԓ�oˢ������řC�ں㶨ֱ����š����d�l�����M���˷��棬�Õr7 h 43 min��
3��1���d��r���·�������η���
�D4�齻����řC���d�rA��늘��@�Mݔ��늉��ķ��沨�Ρ����沨���еĶ�늉���Чֵ�s��32 V����ͨ�^���Hԇ�y�õĿ��d��늉���Чֵ��30 V���`��s��ٷ�֮6��67��B��c���cA����d늉����Μ���120����240��������ƪ�������ڴ�ʡ�ԡ�
���d�r���ń݃H�Ʉ�Ŵń��ṩ�����]��늘дńݵ�Ӱ푣����늉���˲�B���Α���ӽ����Ҳ����������D5����d��B����@�M�Б��Ą��늉����沨�Ρ����沨���еĄ���@�M��늉���Чֵ�s��14��5 V����ͨ�^���Hԇ�y�õĄ���@�M��늉���Чֵ��16 v���`���ٷ�֮9��4��
��Ҋ�����·���Կ�������Magnet�����Ķ��S����Ԫ˲�B�\�ӈ�ģ�ͽ���õ��ķ���ֵ�c���yֵ�dz��Ǻϣ��C����ģ�͵Č����ԡ�
3.2���d��r�´�·�������η���
���ڿ��d��B�£���ֻͨ�Ʉ���@�M�a���Ą�ŴńݛQ�����]��늘��@�M�Б�늄ݮa����늘з���Ӱ푣����Դ�������λ���S�D�ӵ��D���ڿ��g�ʌ��Q�D�ӡ�����ֲ��D��D6��ʾ��
ͨ�^�D7a���D7b�Ĵ��ܿ�ʸ���D���Կ�����늙C������r�̵Ĵ��ܶ������ɽ���õ������d�rʸ���ń�Ҳ�������D���D�ӵķ��������Q�D�ӣ��Oѥ�в������Ĵ��ܸ���߅�����ܣ��O�������D�S̎����С�ڿ�����϶̎����ֵ��
���ڽ�����řC�����D늘�ʽ�Y��ʹ���D��늘��@�M��������܌��H�y������ͨ�^ģ�ͽ���t���Է���صõ�ia��ib��ic�������ֵ��ͬ�rҲ������������ň����g��ʸ����λ�����ܡ���机ʹ�λ������朿��gֵ���f�����Ľ����Ĕ��Wģ���܉�ʴ_�ط���늙C�Ȳ�늴ň��\��ԭ����˲�B�\��������ͬ�rҲ�����Mһ���M�й��Ϲ��r�о���
4�Y�Z
����ᘌ�ij�ͺ��ս���cscF�Դ�еğoˢ������řC������Y�����c������Magnetܛ����������S˲�B�\�ӈ�������Ԫ����ģ�ͣ��о���ԓģ���ڿ��d�r��늘ж�늉������늉����·˲�B���κʹ�������λ����ʸ�����ܵȴň�˲�B���ε����c��ͨ�^���Ȍ��yֵ�c����ֵ���C����ģ�ľ��ȝM�㹤���OӋҪ����˲�B�ň�ʸ����Ӌ���׃��څ�ݽo���˷�����ԓ��ģ����Ҳ�������OӋ������͵�ͬ���l늙C��늄әC�����řC��ͬ�r�鷀����·���������ȹ��Ϲ��r��˲�B늴������о��춨�˻��A��
|