���ڦ�C��OS�����DSP���_�P����늙C�L���l�ϵ�y
����ͣ��w�°�
(���K��W�����K悽�212013)
ժҪ����Ҫ�����ˌ��r����ϵ�y��C��OSһ1I��ֲ��DSPоƬ����Ҫ��ɵĹ��������ڦ�C��OS��II����ϵ�yƽ�_�Ͼ������_�P����늙C�L���l�ϵ�y�Ŀ��Ƴ�����6��(12��10)�Y��3 kW�_�P����늙C�L���l�ϵ�y���M���ˌ����Y����������C��OS �����_�P����늙C����ϵ�y�еđ����Լ��_�P����늙C�����L���l�ϵ�y�ǿ��еġ�
�P�I�~����C��OS-���r����ϵ�y����ֲ��DSP���_�P����늙C�L���l�ϵ�y
�ЈD���̖��TM352 �īI���R�a��A ���¾�̖��1004��7018(2008)08��0020��03
0�� ��
����Դ��ȱ�ͭh��څ���Ľ��죬�L������һ�N�������坍��Դ������������������ҕ���_�l�������L���_�l������Ľ�����������h���rֵ�Ͱlչǰ������20����L늼��g���˾���M�����L��_�l�ڸ��N��Դ�_�l��������졣�l늙C���L���l늙C�M�Ќ��L���D������ܵ���Ҫ�b�ã������Hֱ��Ӱ�ݔ����ܵ��|����Ч�ʣ�ҲӰ������L��D�Qϵ�y�����ܺ��b�ýY���ď��s�ԡ��L���ǵ��ܶ���Դ�����в��������S�C�����c�����Ƽ��g���L���C��ȫ��Ч�\�е��P�I����������m�����L��D�Q���\�пɿ���Ч�ʸߡ������ҹ���������õİl늙Cϵ�y�����M�Ŀ��Ƽ��g���L���l��ƏV���õ��P�I��
�_�P����l늙C���H���нY�����Ρ������ܶȸߡ��^�d�����������o�B���ܺá��ɿ��Ժ�Ч�ʸߡ����e�Ժõ����c������߀�Ѓr��͡�Ч�ʸߺ��m���������ȃ��c�����S��̎�����İlչ��DSP���@ʾ������Ӌ�������������Ӳɘ��ٶȺ���ɏ��s�Ŀ����㷨��ģ�����ơ��W�j���Ƶ��㷨�����˵�����ϵ�y�С���ǰ���_ϵ�y�Ͼ���ϵ�y���Ƴ���׃Խ��Խ���y�����ҳ���Ŀ��x��Ҳ��׃�����Щ���r��Ҫ��ܸߵđ��È��ϣ�ǰ���_����������܌��F����������Č���C��OS-��ϵ�y���뵽���r��Ҫ���^�ߵ��_�P����늙C�L���l�ϵ�y�С�
1�_�P����늙C�L���l�ϵ�y�M��
1��1�_�P����늙C�l�ԭ��
���ԗl���£��_�P����늙C(���º��QSR늙C)ijһ��˲�r늴��D�ر��_ʽ��
��ʽ(1)��֪��SR늙C늴��D�صķ���������������Ӱ푣��Hȡ�Q��늸��S�D�ǵ�׃��(�D11--)�Q���ģ��������̎�ڈD12--�^�g�r���a�����D�أ������D1�ڦ�2����3�^��SR늙C������늄Ӡ�B(SRM)���������̎�ڈD13--�ą^�g�r���t�a��ؓ�D�أ��������D1�ڦ�4����5�^��SR늙C�����ڰl늠�B(SRG)����ֻҪ�����D��λ�Á��������_�Pͨ��Ƕȣ��Ը�׃������ķ�ֵ�͌��ȣ��Ϳ��Ԯa����ͬ��С�ͷ����늴��D�أ����FSR늙C�Ŀ����\�У�
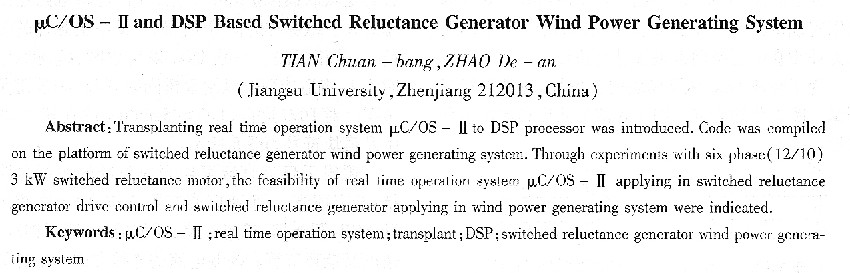
���ԗl���£�SR늙C�Ć�������ĵ��Ͳ�����Dl��ʾ��
��on����off�^�g�����A�Σ������i(t)������ԴUs����a�������Q�ڦ�off̎���������СIh�������������ӳ��sRG��ŏ��Ⱥ̓���ň������Ĵ�С�����A��sRG������ܣ��惦���͙ܺCе�ܡ���>��off�^�g��l��A�Σ������i(t)ͨ�^�m�����O����SRG�Ȳ��������љCе�ܺʹ����D�������ጷų��������A�ε��m��������Dz���ֱ�ӿ��Ƶġ���
�@Ȼ��SRG��ݔ�����ʞ�l늹��ʺ̈́�Ź���֮���˞��ˌ��F������ݔ�����l��A������������
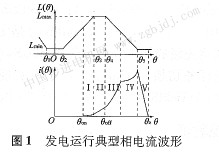
1��2 SR늙C�L���l�ϵ�yӲ��
SR늙C�L���l�ϵ�yӲ��[1-3]��D��D2��ʾ����TMS320F2812 D��sP����ģ�DsPͨ�^���@��Ԫ�õ�λ�÷�����̖���_���D��λ�ú��D�٣��xȡAD�ɘӵõ���ĸ�������늳�늉����Д�ϵ�y���r���Q��������ͨ���P����r��ݔ����6���|�l��̖�����o�·������ز��·�Ŵ���xݔ����ϵ�y�Ĺ��r��DsP��������(DB)�ӿ�ݔ���@ʾ��
2���ڦ�C��0S-��Ƕ��ʽƽ�_��ϵ�yܛ���Y��
����ǰ���_ϵ�y����Ҫ���ܰ����ٶ�Ӌ�㷴�����ɼ�I��O��ADݔ�롢����h���ơ�λ��Ӌ�㡢늙C��λ�ГQ���ٶȿ��ƭhӋ��ȡ��ij���Y���ɿ�����ԓ�����OӋ����ֻ�m���ں��εĿ����㷨�����]���������΄��ГQ���ܣ�DsPֻ�Ǻ��ε��ڳ���������\�С�һ�������㷨׃�Ï��s����������ϵ�y���r푑�׃����SRM����ǰ���_���Ƴ���ϵ�y�Y���D��D3��ʾ.
���û��ڦ�C��0S-���ܛ��ƽ�_,ʹ��ܛ��ϵ�D5--�y�Ӵ�������ģ�K���ܪ��������ھS�o���ģ�����Ҫ����ϵ�y���r�Եõ��w�F���߃��ȼ����΄�ʼ�K****�õ��\�С�ϵ�yܛ����������ϵ�y���Ñ����ó���ɂ����֡��΄Մ���ͬǰ���_ϵ�yһ�£���늙C��λ�ГQ��ģ�M��A��Dݔ�롢����ɘӼ��ز����ٶ�Ӌ�㡢�p�]�h�{����������ݔ�뼰ݔ�����@ʾ�΄�7���΄�[3-4]����������Ҫ�Ժ͌��r�Ԍ��������鲻ͬ�ă��ȼ�(���1��ʾ)��
����7���΄��⣬ϵ�y߀��3���Д����������50��s�r犹����Д࣬���Д����ȼ�****������һ���Dz��@�Д࣬�����D��λ�à�B��Ϣ���£�߀��һ�������Д࣬���F׃�Ƕȿ��ơ�
��C��0S-����΄պ���ͨc����һ�ӣ��к���������ͣ�����ʽ����׃���������h�������{�á�������7���΄վ��ɺ�����ʽ����ϵ�y����������һ����****���еĺ�����ԓ�������h�������ء����������������е��Д࣬�{��ϵ�y��ʼ�����������Nܛ��Ӳ���M�г�ʼ��(����ȫ��׃����ʼ�����Дࡢ������ݔ�ˣ�ݔ�����@ʾ��Ӳ����ʼ��)�������{��OsInit()������ϵ�y�M�г�ʼ�����چ��Ӳ���ϵ�y֮ǰ���Ñ�����Ҫ����һ�������΄ա�����{��OSStm()����RTOs������ѿ��ƙཻ�o��RTOs����RTOs�Ĺ������FSR늙C������ٶȵĿ��ơ�
����ɘӡ�����ز��΄գ�����ɘ���Ҫʹ�õ���DsP�е�ADģ�K�����H���ͨ�^������������ɘ���衢�Ŵ�h������DsP��AD���У��Ϳ��ԫ@�����ֵ������ز����w������DsP������ͬ��r�o����ͬ������ز��yֵ����ϵ�y���õ��������ޔز��ķ�ʽ����������^���ބt�P��IGBT���������ބt�_ͨIGBT��
�ٶ�Ӌ���΄գ�����DSP�в��@��Ԫ�����@����Ӌ��ֵ��Ӌ���ٶȡ�����õ�sR늙C��6��(12��lO)�Y������ˣ��������D�r��ÿ��λ�Â������a��18�����}�_��������λ�Â������քe���˲��@��Ԫ��cAPI��cAPZ��cAP3��Ȼ���O�ò��@λ����̖�ăɂ�߅�أ������@6��Ӌ��ֵ���������@����Ӌ��ֵ���Եõ��D�ٵ�Ӌ�㹫ʽ��
ʽ�У�T���}�_���ڣ�Ncoun t�鲶�@����Ӌ��ֵ��
�p�]�h�{���΄գ�ϵ�y�����p�]�h�Y�����{���������У���h���D�٭h���ȭh������h���@���҂��õ��ǽ����PI�{����
3���w��ֲ����[5]
��OsTaskstkInit()�У��΄նї��^�Ę������c��DSP2812�Ķї��^�ɵ�������L��****̎���΄�����ڣ�������Pcָᘺͳ����B�֡��΄��ЕrҪ���R�r�Ĵ����Ϳ�ܼĴ����M�б��o�����_���΄նї��Ę�������΄Ն��Ӻ������΄��ГQ�������P�I�ǣ��ڵõ���****���ȼ����΄նї�ָᘺ���ΰ����_�����������ҵ�Pcָᘡ������΄��ГQ�������ГQ�΄�֮ǰ߀Ҫ��������ǰ�΄յĬF���M�б��o�ij���ͬ�r߀��ע�⣬�������Д���ճ����Л]�ж��x�ֲ�׃�����@ʹ�þ��g�����܌���ܼĴ����M�б��o����ˣ����@һ�Ĵ����ı��o�����OӋ�r�Լ����ϡ�
��ֲҪ�c�ǣ�
��ֲ������Ҫ�ǸČ�Os_cPu��H��Os��cPu��cos_cPu��AsM�����ļ���
Os��cPu.H�ļ��а����c̎�������P�ij��������Լ���ͣ�ԓ�ļ���Ҫ������¹�������C��0S-�����ֲ����һϵ�е���Ͷ��x���Դ_�����һֱ�ԣ����x�����ֹ�����S�Дࣻ�_���ї������L�����xOs TAsK_sw()�ꡣ
��Os_cPu��c�ļ�����Ҫ��������10�����ε�c������OSTaskstkInit()��OsTaskcreateH00k()��OsTaskDelHook()��0STaskSwH00k()��OsTaskIdle��H00k()��OSTaskStaTH00k()��OSTaskTickH00k()��OS��InitH00kBegm()��OSInitH00kEnd()��OSTCBInitH00k()�����У�9��ϵ�yHook�������Ԟ�պ�����Ҳ���Ը����Ñ��Լ�����Ҫ���������IJ������a���΄��Y����ʼ������OsTaskstkInit()����횸�����ֲ�r�yһ���x���΄նї��Y���M�г�ʼ���� OS_CPu��ASM�ļ�����4���R��������Os��StartHighRdY ()��OSCtxSw()��OSIntCtxSw( )OS��TickIsR()�����У�OSStartHighRdy()�nj��Fʹ�;w�B****���ȼ����΄��_ʼ�\�У�Osctxsw()�nj��F�΄ռ��΄��ГQ��OsIntcrxsw()�nj��F�Д༉�΄��ГQ��0sTIckISR()�nj��F�r犹����Д�ISR��
4ϵ�y��C
�����6��(12��lO)�Y��3 kw�_�P����l늙C��4 kw���ཻ������늙Cģ�M�L���C���l�ԇ��D�ٷ�����1 000��3000r��min���c��늳ز���400w���ʻ���׃��������늚�ؓ�d�����v�������㉺�ɂ���늳س��ģʽ������·�D��D4��ʾ��
�D5��1 200 r��min���B�l������(chl)�c�����̖(ch2)���y���Ρ�ԇ���������ڦ�C��0S-���ܛ��ƽ�_������ƣ�늙C��λ�ГQ��������������������ˌ��r����ϵ�y���_�P����늙Cϵ�y�Б��õĿ����ԡ���ԓ�D����ŽY����������ʬF���@���ϛ_���l늅^���^�l�Ч���^�ߡ�
�D6��Ӻ����A�S�o������ͻ�ӡ�ͻ�p����ؓ�d��r�³�����(chl)�������(ch2)푑����Ρ����Կ�������ؓ�dͻȻ׃�����������Ѹ�ٷ�����ʹ�������ܿ��{����������B�������^���Ŀ��_��������������sR늙C�����L���l�ϵ�y�Ŀ����ԡ�
|