����ֱ������늙C���Կ��_����
�˄��w���V�ң�����
(���ڴ�W���V�|����518060)
ժҪ��������ֱ������늙C�Cе�Y�����M�Լ��Կ��_����(AI)RC)���g�đ��á�ֱ������늙C��������ɱ��͡��Y�������Լ��ɿ��Ըߵȃ��c���Կ��_�����������m���Ȳ��Լ��ⲿ�ɔ_�����r�{���������ݏ������c��Փ���˲����Կ��_���g��ֱ������늙C���ٶ��{������͌��Y��������͌��Y�����������Կ��_��������PID�����������ڸ��N�ɔ_�����¿��ɔ_�������������Ժõ����c��
�P�I�~��ֱ����ϵ�y��ֱ������늙C���Կ��_����
�ЈD���̖��TM352��TM359��4 �īI���R�a��A ���¾�̖��1004��7018(2008)08��0001��04
0����
�S�������Ӽ��g��****���Ƽ��g�İlչ���˂�Խ��Խ�Pעֱ����ϵ�y��ԓϵ�y�o������κΙCе��ݔ������ֱ�ӿ��Ԍ�����D���əCе�ܣ����Fֱ���\�ӡ�����\�ӿ���ϵ�y���Ա���ز�t����һϵ�ЙCе����Ć��}�����⽛���ԵęCе�{���;S��������֮��ֱ����ϵ�y���п��ƺ��Ρ�푑��ٶȿ졢���ٶ�ݔ�������c��
ֱ������늙C����ֱ����ϵ�y�ķ������c����ֱ����ʽ늙C���(ֱ������ʽ늙C����ֱ���Б�ʽ늙C)��ֱ������늙C���нY�����Ρ��ɿ��Ըߵ����c�����Ҳ������κΏ��s���F�IJ����������w�ȡ�늙C���wֻ�������Ƭ�BƬ�;�Ȧ�șCе������ԓ늙C���OӋ�Y�����īI[1]��������B��
�������ؽ�Bһ�N���M�͵�늙C�Y�������Ҍ�һ�N���͵Ŀ��Ʒ������õ�ԓ늙C���ٶ��{���С�
1늙C�Y��
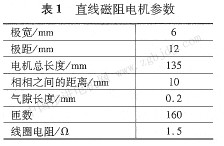
ԓֱ������늙C����һ���\��ƽ�_��һ�Mֱ����܉���BƬʽ�Ĺ��Ƭ�̶��ڶ��ӻ����ȡ��\��ƽ�_�Ͷ��ӻ����IJ��϶��ǽ����X�����̈́��ӺͶ��ӻ������|�����BƬ�Y������0��5 mm��Ĺ��Ƭ���ɣ��ӡ����ӷքe�B��50Ƭ����1��늙C�Cе��늚Ⅲ����
늙C����������Ȧ��ÿ����Ȧ���ǽ��ݽz�̶����\��ƽ�_�ϣ�ÿ����Ȧ���120 ����늚�Ƕȡ�ԓ�Y������ʹ�ø�����֮�g�Ļ����_����С [2]�����˱��C�^��ˮƽ����ݔ�����\��ƽ�_�Ͷ����X֮�g�Ŀ՚�϶�̶���0.2mm������ͨ늺�Ӷ���֮�g���������ܴ�ʹ���\�����g�ęCе�Y�����̣�ÿ��һ�����x�����Ƭ�BƬ�����T��i�o�����ӵĹ��Ƭ���A�U�̶��ڶ��ӻ����ϡ��D1��ֱ������늙C�����w����D�� 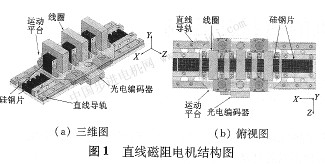 �c�����ڌ���Ҙ����ֱ��늙C���[1]������ԓ늙C�ęCе�OӋʹ�՚�϶���ӷ��̣���늙C�ęCе�����ԏ�������ͬ���ݔ���£�늙C�����^���ˮƽ����ݔ����
���ˌ��F****�����ٶ��{�������IJ����Կ��_���g���ٶȅ����M�п��ơ��Կ��_�㷨��****���c��������هԔ����늙C���Wģ����Ϣ������PID�㷨��������ģ�̓��ڻ����ĸɔ_Ӱ푡�����͌��ĽY���C����ԓ��������ʹֱ������늙C���m���ڹ����ھ��и��N�ɔ_�ĭh���¡�
2�Կ��_���������OӋ
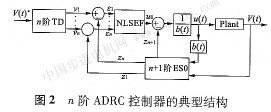
�Կ��_���������ָ�ۙ��(TD)���U����B�^�y��(EsO)�ͷǾ��Ԡ�B�`���������(NLSEF)�M�ɣ���D2��ʾ���ָ�ۙ���ṩ��ݔ����̖�Ŀ��ٟo���{�ĸ�ۙ�����酢��ݔ���ṩ���A������̖���U����B�^�y���Á���Ӌ������A��B׃���͌��_�ӵČ��r���������Ǿ��Ԡ�B�����ɽ��Ձ��ԔU����B�^�y����ݔ�������������������ĵ��`�����ɔ_���a����������
2��1�ָ�ۙ��(TD)
��늙C����ϵ�y�У�����̖(���ٶ�)һ�����ɽo��ݔ����̖(λ��)ͨ�^�����ֵȷ����õ����@�N����ʹ��Ӌ�������̖���кܶ���������̖�������_��ȡ[4]���ָ�ۙ��������ЧӋ�㲢��ȡ����̖[5]�����͵��ָ�ۙ����ݔ����̖�ԃɷN��ʽݔ����ݔ��ĕ��B�����Լ�ݔ����̖��һ�A�֡�һ�A�ָ�ۙ�������½Y����
ʽ�У�v�酢��ݔ����̖��v1���ۙ��̖��r����0�ͦ�0����Ҫ�{���ą���������fal�����ı��_ʽ�飺
2��2�U����B�^�y��(Es0)
����һЩ�Ǿ���ϵ�y�����Բ������µĔU����B�^�y���Y����
ʽ��:f(x��x��...��x(n-1)t)��δ֪�������_ʽ��w(t)��δ֪�ɔ_�����U����B�^�y�������þ����OӋ��B�^�y���Ķ����_�^�y��B׃��x��x������x(n-1)���o�֪������f(x��x������x(n-1),t)���ɔ_w(t)�ľ��w�Y����ʽ��
������о����}�������B׃��xn(t)����U����B׃�����OӋ���µĠ�B�^�y���Y����
�����ƌ��ṩһ�N�OӋ�U����B�^�y���Ļ���˼·���҂����Ԍ�����δ֪�����������ɔ_���������ӵ�����һ�����w̎����������ʽ(4)�ĽY�����P�ڔU����B�^�y����Ԕ�������Ʌ���īI[7]��
2��3�Ǿ��Ԡ�B�`���������(NLsEF)
�ژ˜�PID�������У��`����^ȥ���F�ں�δ����̖�О���ǽ��^���ԯB�ӵ���ʽݔ�������Կ��_�������У��`��IJ�ͬ��ʽ���÷Ǿ�����ʽ�M�нM�ϣ�����ÿһ헵ę�ֵ���Խ��^���Hϵ�yݔ�����挍Ч���M���{����
���͵�n�A�Ǿ��Ԡ�B�`��������ɵ���ʽ����[8]��
ʽ�У�ki(i=l��2������k)�����ͦ��Ǵ��{����������i���`����̖�����ҏ�n�A�ָ�ۙ����ݔ���@�á���D3��ʾ���c���`����̖�ľ��ԽM�ϲ�ͬ���`������ˡ��ą^�g�r�������S���`���������p�٣��Ķ�����С�`������控���ĸ��l�ɔ_[9]��
������ݔ�����Ա�ʾ���£�
ʽ�У�a(t)�ǏķǾ��Ԡ�B�`����������^�y����ȫ�����_�����c�ɔ_�Ŀ��͡�
3ֱ������늙C���Կ��_�������OӋ
�����_�P����늙C���f��ϵ�y�Ŀ��ɔ_������ؓ�d��Ħ������׃���������|��׃������������}�ӵ����صȡ�ֱ������늙C����ƽ�ⷽ�̿��Ա�ʾ�飺
ʽ�У�uq��늴����Ŀ��ͣ�f1(t)��ؓ�d����M��B���քe�DŽ����|����Ħ��ϵ�����������|����Ħ�����Լ�ݔ���}�ӵIJ��_�����ػ�ɔ_��Ԓ���t��
ȫ�������ⲿ�ĸɔ_�̓Ȳ��IJ��_�����أ�  ����a(t)=  �ٶ��ַ���ʽ(9)��ֻ�����˻�ϲ��_�����ء�a(t)�Ϳ��ƅ���bu q����������a(t)���Ա��Կ��_�������ʴ_�^�y�����r�����o����ϵ�y��ֱ��늙C��ģ�Ϳ��D����˜�һ�Aϵ�y�Ŀ��Ɔ��}�� ���ڱ����������ٶȣ��ָ�ۙ����ݔ�����ٶ�ָ�ݔ�����a��һ������ݔ����^���^�̣����_ʽ�飺
ʽ�У�r_T����_T���ͦ�_T������{��������ݔ����V1�͔U����B�^�y���ķ����ٶ����M�б��^���`���ɷǾ��Ԡ�B�`��������ɛQ����ݔ����Ӌ����m��uoֵ��
��������������_N����_N�ͦ�_N������������ݔ���飺
ʽ�У�b=1/M�����y�ٶ�ֵVbakݔ��U����B�^�y�����ٶ��^�yֵZ1�͔U����B�^�y��Z2������ʽ�Q����
�����Ă�������01_E����02_E����E�ͦ�E�������ϵ�������������w�Y����D4��ʾ��
ADRc�ą����{�����ǻ��ڷ���͌��Y���xȡ���m�ą���ֵ���ָ�ۙ���������xȡ�Ǹ����܉�����İ���һ���^���^�̼������`����ȸ�ۙݔ��ָ��[5]���U����B�^�y������������O�c����ķ����x��ʹÿ����B���ܱ����_�ĸ�ۙ[6-7]���Ǿ��Ԡ�B�`��������Ʌ������xȡ�Q�����B�`���С�������{��Ҳ�ǻ��ڌ��H�{ԇ�Y��[8]��
��늙C�ĽǶȶ��ԣ�����ADRc��������ݔ��uq��������ָ��Ŀ��͡��Į�ǰ��λ�ÿ���Ӌ���ÿ����ָ���ֵ����ָ��Ĵ�С��ij���Ƿ�ͨ����Ʉ��Ӯ�ǰλ�ü��\�з������Q����늙C��ݔ�����ָ��ֵ���Կ��_����������ָ���Լ���ǰ��λ�÷���ֵ�Q��������λ���Լ�����Pϵ�ı��_ʽ��
ʽ�У�P��x��i��O�ࡢλ�ú��������2��L����ȫ���R�ͷnj��Rλ�õ�늸�׃��ֵ����ʽ(14)�������������λ�õķ������Pϵ���Ժ�����ͨ�^Ӌ��õ�[11-12]��
4����͌��Y��
4.1����Y��
������C�������Ŀ��ɔ_���ԣ��������Կ��_�������cP1D��������Ч���M�з�����^������������ׂ����棬�����������Ѕ�����׃�����l����O��2 s�r�̣�
(1)M=3M0(�|��׃��ԭ����3��)
(2)��ָ��_��(���Ӱٷ�֮20)
(3)Ħ����׃��(���Ӱٷ�֮lO)
�D5�����������N�ɔ_��PID���Կ��_�����µķ���Y�����D5a�f��PID���������|����׃�´���һ����Ӱ푣�����ָ��_���o���ʴ_��ۙ�ٶ�ָ��(�D5c)����Ħ�����_���´��ڷ��B�`��(�D5e)�����Կ��_�����������ώN�ɔ_�����a���κ�׃��(�D5b���D5d���D5f)������Կ��_���������кܺõĿ��ɔ_�ԡ�
4.2���Y��
�������dSPACE DSl 104���ƿ���������������ƿ��cPCֱ��ͨ�^PCi�����ӿڡ�λ�ú��ٶȷ�����̖�ɹ̶��ڄ����ϵ�ֱ�����a���ṩi늉�ָ����DAC(��-ģ)ͨ��ݔ�����������������ݔ��ָ��������������������z�y�·�ṩ�������odSPACE��ADC(ģ��)ͨ������h�ɘ��l�ʞ�2 kHz���ȭh10 kHz�����ƿ�D�͌��ʾ��D��D6�͈D7��ʾ��
������ڔ_��ݔ����r��ᘌ����_���ƺ�PID�����㷨�M�б��^�����ڌ����ᘌ�늙C�\���ٶ��M�и�ۙ�����a��λ��Ư�ƣ�늙C�\�г������������Կ��_�������У��H���ñ�������(P=12)��늙C���\�з����M�����ơ�����ɔ_ǰPID�Ͱ��_���������\�ӿ���ϵ�y�{���������2��ʾ��
�D8a���D8b�͈D8c���D8d�քe�@ʾ��PID���Կ��_�������£�������1 kg����ӄ����|���Ϳ���ָ��׃���r�ٶȵ�푑����������п��������ɔ_����r����P1D�������M���^���c�r���ٶ�푑��{�����кܶ��������Կ��_����ϵ�y�ٶ�����ƽ�������Ҳ��ܵ������ٶȔ_�ӵ�Ӱ푡�ԓ���Y���c����Y���c�D5��һ�¡�
Ħ�����������ǽ����ڏ��ɵ�����������ϵ����35 N��m�����ڏ���ֻ���Іη�����������ã�늙Cֻ��һ�������ϴ������ĸɔ_�����Ǹɔ_���Ĵ�С���S���������L��λ���S�r׃���ġ��D8e���D8f�@ʾ���ٶ�푑������f���ڏ��������£��ɂ������푑��Dz����Q�ģ��Կ��_�������µ��ٶ�푑�������PID��������С����˰��_���������б��^���������ԡ�
5�Y�Z
�������ֱ������늙C�ęCе���M������������һ�N����هģ�͵Ŀ��Ʒ��������F��ֱ������늙C���ٶ��{��������͌��Y�����c���yPID�M�б��^���ĽY�����Կ������Կ��_�����������N�ɔ_�����ò����@�����к��������ԣ������ʹ늙C���m���ڹ����ڔ_�ӵĹ��r�¡�
|