| ֱ������ͬ���ŷ�ϵ�y�Ļ�ģһ�W�j����
���裬�����������s
(�㽭���I��W������310014)
ժҪ��ᘌ�ֱ���ӵ�ֱ������ͬ���ŷ�ϵ�y�����һ�N���ڻ�ģ���ƺ��W�j������Y�_���p���ɶȿ��Ʋ��ԡ���ģݔ�˿��������C��ϵ�y���o���Ŀ��ٸ�ۙ���ܣ��W�jݔ��������������ϵ�y�����z�Ӻ���������׃���M�����ƣ��������˻�ģ���������ϵ�y����ԓ���Ʋ��Ժܺõؽ�Q��ֱ������ͬ���ŷ�ϵ�y�ĸ�ۙ���ܺ���������֮�g��ì�ܡ�����Y������ԓ�����ڱ��C�ŷ�ϵ�y�����Ե�ͬ�r���������z�Ӻ������_��(�����ǷǾ��ԕr׃�_��)���кܺõ������ԡ�
0�� ��
ֱ������ͬ��늄әC(���º��QPMLSM)��ֱ�ӌ�����D�Q��ֱ���\�ӵ������b�ã���ؓ�dֱ���cPMLSM�Ą������B�������˙Cе�ٶ�׃�Q�C����������һЩ����Ӱ푣���Ħ�����Cе��_��������׃�ȣ��ڸ߾��ȡ��M�o�ŷ�ϵ�y�гɞ���ЙC��****�x���ǣ�����ֱ��늙C�Ą���ֱ����ؓ�d��ؓ�d׃�����ⲿ�ɔ_��ֱ��Ӱ��ŷ�ϵ�y�����ܣ�ͬ�r��ֱ��늙C�Ķ˲�Ч����ϵ�y����(�����|����ճ��Ħ��ϵ����)��׃����Ħ�������ķǾ���׃���Լ���B���^�y���ȶ�������ϵ�y���ŷ����ܡ����˱��Cϵ�y�����ܣ����y��PID�����џo�����Σ���Ҫ�����µĿ��Ʒ���ʹϵ�y�ڱ��C���ٸ�ۙ���ܵ�ͬ�r�������_���_�Ӿ��к��������ԡ�
��Ҏ�Ć����ɶȿ��ƽY�����yͬ�r���Cϵ�y��ݔ��ĸ�ۙ���ܺ͌��_�ӵĿ��_���ܡ��p���ɶ�(2DOF)������ͨ�^���o��ݔ��푑��Ŀ�����c1(s)�͌��_��푑��Ŀ�����c2(s)�M��������OӋ�����Խ�Q��ۙ���ܺͿ��_����֮�g��ì�ܡ�
��ģ׃�Y�����ƾ��п����ԡ������Ժ͌��F���εȃ��c��ʹϵ�y�����_������������׃�������W�����IJ��_���Լ��ⲿ�_�Ӿ��в�׃�ԡ������ڌ��Hϵ�y�У�����ϵ�y�ڕr�g�Ϳ��g�ϴ���������ģ�ГQ���ƵIJ��B�m�Ԍ�ʹϵ�y�a�������F���ҡ����ķ����cϵ�y����׃���ķ������ⲿ�_�ӵķ�ֵ�������Pϵ��������Ӱ�ֱ�����ŷ�ϵ�y��ƽ���ԺͶ�λ���ȣ����������p�ĵȡ�
���IJ��û�ģ���Ʒ������OӋ�p���ɶȿ���ϵ�y�е�ݔ�˿�����c1(s)���Ķ��õ�һ�N���Џ������ԵĻ�ģ�p���ɶȿ��Ʒ��������þ��к��ČW���������W�j�������OӋ�p���ɶȿ���ϵ�y��ݔ������������c2(s)��ͨ�^�ھ��W���܉��ڱ��Cϵ�y�����Ե�ͬ�r���������z�Ӻ͔_��(�����ǷǾ��ԕr׃�_��)�M����Ч�������a��������������ģ���ƵĶ�������ŷ�ϵ�y�ķ��B���ȡ�
1 PMILSM�Ĕ��Wģ��
PMLSM�Ļ����Y��������ֱ���ŷ�ϵ�y�ĽY����ԭ��ԔҊ�īI�����҂��H���]��������������ʹ��d-q�Sģ�͡�늉�����朷��̞飺
늴��������_ʽ�飺
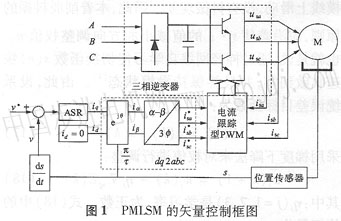
��PMLsM�M�л����D�Ӵ�朶����ʸ�����ƣ���
�D1��ʾ��
��Ҫ��������ʸ���c���������w�ň��ڿ��g������������ȭh���Ä�ŷ���id=0�Ŀ��Ʋ��ԣ�늴�����Fm�ciy�����ȡ����]��PMLsM���ڶ˲�Ч���a���ĵ�Ч����Fd���@����Ч��ؓ�d������һ���֣�����ʾ��F1���tPMLSM���\�ӷ��̞飺
ʽ�У�id��iq�����늘�d�S��q�S�����ud��uq�����늘�d�S��q�S늉���Ld��Lq�քe�DŽ���늘�d�S��q�Sͬ��늸У�R�����늘���裻M����Ӻ̈́�������ؓ�d�Ŀ��|����B��ճ��Ħ��ϵ����v������ٶȣ��Ӟ�O�ࣻ�מ鶨�������w�a���Ą�Ŵ�朣�K1��늴�����ϵ����F1��ؓ�d����(���˲�Ч���a���ĵ�Ч����)��
2��ģһ�W�j�p���ɶȿ���
���ڻ�ģ׃�Y��������ͨ�^���l�ГQ����ʹϵ�y�ĽY���ڄӑB�^��������Ŀ�ĵĸ�׃��ʹϵ�y�\�Ӡ�B�����_�����ء�����׃�������Wģ�͵IJ��_���Լ��ⲿ�_�Ӿ��в��_���ԡ�ͬ�r����ģ���ƾ��п���푑��ă��c����ˣ����˱��Cϵ�y�������õĄӑB��ۙ���ܣ����뻬ģ���Ʒ������OӋݔ������������W�j�������OӋݔ�������������������W�j���к����ԌW���������܉��N�_�Ӻ�ģ�͵ą����z���M�Ќ��r�W�����ڱ��Cϵ�y�����Ե�ͬ�r����ϵ�y�����z�Ӻ���������׃���M�����ƣ���������ģ���������ϵ�y�����@�ӣ����H����ʹϵ�y���к��������ԣ������܉����ϵ�y�ķ��B���ȡ�����ϵ�y��D��D2��ʾ��ϵ�y��������ݔ����u=unn+usm�����У�unn���W�j����헣�usm�黬ģݔ�����헡�
�D�У�sMEc�黬ģ��Ч���Ʋ��֣�sMsc�黬ģ�ГQ���Ʋ��֣�NNc���W�j��������TDL�����^�ӕr��Ԫ����ݔ��ʸ����ݔ����̖���ӕr���ɡ�
���¶��x��B׃����
���ٶȽo��ֵ)����ʽ(4)�ɵõ�ϵ�y�Ġ�B�`��̣�
���У�an��bn��dn�քe�Ǖr׃������a(t)��6(t)��d(t)���~��ֵ��
 ��Mv+��Bv��f��ϵ�y�ďV�x�_�ӡ� 2��1��ģݔ��������OӋ
��ʹϵ�y�������ӑB�^���ж����л���ģ�B�������Cϵ�y�������ӑB푑��^���о��������ԣ��ڻ�ģ���OӋ�У������Be�ķe��헣�
ʽ�У�Io��e�ֳ�ʼ�l����
���˱��C�ij�ʼ�c�_ʼϵ�y���M�뻬ģ����t=O�r�������cIo+e(0)=0����ˣ��xȡ�e�ֳ�ʼ�l���飺
ֻҪ�M��V�x��ģ�l��s��s<0��ϵ�y�Ġ�B܉�E�͕������ĕr�g���M�뻬ģ��B����ϵ�y�M�뻬ģ��B֮�͕���s=0��ϵ�y�ĄӑB���̞飺
e+ce=0 (8)
��ʽ(8)���Կ�������Be��1/c��r�g������ָ��Ҏ��څ�����㡣�`��ϵ�y�u������������ͨ�^�m�����x��ģ����ϵ��c���Ϳ��Ա��Cϵ�y���п��ٵĸ�ۙ���ܡ�
���˜pС�ГQ�������ķ�ֵ����ģ׃�Y�������ɲ��õ�Ч���Ʒ�������ģݔ��������ĽY���飺
usm=ueq+us
ʽ�У�usm�黬ģ����헣�ueq�黬ģ��Ч����(sMEc)���֣�����ϵ�y��s=0��f=0�r����Ҫ�Ŀ�����������PMLSMϵ�y��ģ�ʹ_�����֣�us�黬ģ�ГQ����(SMSc)���֣���ͨ�^���l�ГQ����ʹϵ�y��Bڅ��ģ���������C��B������ģ�����B�c��ʹϵ�y���к��������ԡ�
������ģ��Ч���Ɨl��s=0��f=0����ʽ(5)��ʽ(6)���ƌ�����ģ��Ч���ƣ�
ͨ�^��Ч���Ʋ����OӋ�����pС���ГQ���Ƶķ�ֵ��
�ГQ����us�����OӋ�飺
����V�Z���Զ����ɵõ���ģ�Ĵ����ԗl�������_�l��s��s<O�����ԣ������@���V�x��ģ�l���������C�҂��Ļ�ģ���ƵĴ����Ժ����_�ԡ�
��ʽ(12)���Եõ���
�����ϸ�ʽ�ɵõ���ģ�ГQ���ƿ��ƅ���a1����2����1����2�����M�����в���ʽ��
2 2�W�jݔ������������
�˹���Ԫģ����D3��ʾ����n��ݔ��xi(k)(i=1������n)����i(k)�������ę�ֵ���Ȟ��yֵ��f��(x)��s�ͼ��l������ȡ�yֵ��=0f��(x)=x��n=3����ϵ�yݔ��v������^�r�ӆ�ԪTDL������Ԫ��ݔ�룬����
�t��Ԫ��ݔ��������������
��ϵ�y���څ����z�ӻ��ⲿ�_�ӕr����ֵwi��(j=1��2��3)�Ԅ��M���{�������ڻ�ģ���ƵĶ����c�ГQ����s���䌧��s�������Pϵ��s�c��B�c�ģ��s=0�ľ��x�����ȣ���s�c��B�cڅ��ģ�����ٶȳ����ȡ���s��s=0�r��ϵ�y��B�����ڻ�ģ���ϻ��ӣ�Ͷ�ж���F����ˣ��������������ԭ�t��������ʹs��s��ֵ�pС�ķ����{����ֵwi��Ҳ�����f��ͨ�^�W�j�ԌW��ʹ�ГQ����s(e)�����Ք����㣬����K���ֻ�ģ��B���ɴˣ��Oϵ�y�`��Ŀ�˺����飺
E(k)=s(k)��s(k) (17)
�����ݶ��½����팦��ֵ�M���{����
���У���j(j=1��2��3)�njW���ʣ���������ʽ(18)�е��������飺
��ʽ(9)��֪��ueq�Hȡ�Q�ڮ��r�Ġ�B�`������e���c��ֵwi(k)�o�P����ʽ(10)��֪��us�ą�����̶�ֵ��Ҳ�c��ֵwj(k)�o�P�����ԣ�
��ʽ(5)��ʽ(6)�ɵã�
��ʽ(18)��ʽ(19)��ʽ(20)�Ù�ֵwi(k)�ČW���ɞ飺
�ɈD2��֪���_�Ӻͱ��،����λ���W�jݔ���������ƭh�У��������������_��Fi(����PMLSM�Ķ˲�Ч���������������)��ϵ�y������׃�������׃�����^����������ȫ�������W�j�ČW���������V�x�_���M�Ќ��r���ơ�
3����Y��
����ǰ����㷨�������҂���MATLAB��simulink�h���½����˻�ģݔ��������ķ�����ģ�K�ͻ��ڻ�ģ���ƺ��W�j������Y�ϵ��p���ɶȿ��Ʋ��Ե�ֱ������ͬ���ŷ�ϵ�y�ķ���ƽ�_�����˻�ģݔ����������W�jݔ�������������ɂ�ģ�K�⣬ԓ����ƽ�_߀����2��3׃�Qģ�K��PwMģ�K��PMLsM����ģ�K����D4��ʾ��
�錦ǰ��������������Ч���M�з����о���PMLsM�ą������£�����늘�d�S��q�Sͬ��늸�Ld=Lq=18��74mH������늘����R=1��2���������|��M=25kg��ճ��Ħ��ϵ��B=0��2 N��s��m���O��r=36 mm�������w��朦�=O��286 wb��Ŀ���ٶȽo��ֵv=1 m��s��
��ģ���ƅ���c����1����1����2����2���W�j������������i(i=1��2��3)�Ǹ����ڷ��挍��о��wЧ�����xȡ�ġ��D5����yPl���ơ���ͨ��ģ׃�Y�����ƺͻ��ڻ�ģ���W�j���p���ɶȿ�����Ŀ�˽o���ٶȞ�v=1 m��s��늙C���Ӻ��F1=40��sin(25t)�ķǾ��������_��(��ҕ��ؓ�d������늙C�����˲�Ч���a���ĵ�Ч�����ľC������)���҄����|��׃��M=2Mn����r��ϵ�y���ٶ�푑�������
�ɈD5��Ҋ����������Ҕ_��(�Ǿ���)��ģ�ͅ���׃���r����ͨPI���Ƶ��ٶ�푑�������ۙ���ܺ��������^���ͨ��ģ׃�Y�����Ƶ��ٶ�푑��澀�^�ɕr�g�^�̣����������_�ӕrҲ����һ�����ٶȲ��ӣ�����һ���̶ȵĶ���F�����ں�С�ķ��B�`����ڻ�ģ���W�j���p���ɶȿ��Ƶ��ٶ�푑������dz��⻬�������]�ж���F����Ӕ_�ӕr�ٶȲ��Ӻͷ��B�`����������ɷN���Ʋ���С����Ҋԓ���Ʒ�����ϵ�y�����z�Ӻ���ӷǾ��Ԕ_���к��������ԡ�
4�Y�Z
����ᘌ�ֱ������ͬ���ŷ�ϵ�y����Ļ��ڻ�ģ���ƺ��W�j���Ƶ��p���ɶȿ��Ʋ��ԣ���������˻�ģ���ƵĿ����Ժ��W�j���ԌW����������Ч�Ŀ˷��˸��Ե�ȱ�c�����挍�Y������ԓ��������Ч���еġ�ͨ�^�W�j�������OӋ�p���ɶȿ���ϵ�y��ݔ�������������������W�j���ھ��W���������Cϵ�y�����Ե�ͬ�r���������z�Ӻ͔_��(�����ǷǾ��ԕr׃�_��)�M����Ч�������a��������������ģ���ƵĶ�������ŷ�ϵ�y�ķ��B���ȣ��Ķ����������ŷ�ϵ�y�������z�Ӻ����������_��(�����ǷǾ��ԕr׃�_��)�������ԡ����ң������@�N���Ʋ��Ե�ֱ������ͬ���ŷ�ϵ�y�OӋ���^���Σ�Ҳ�����F���ڌ����١��߾��Ȼ�Ҫ����ߵĔ��ؼӹ��I�����һ���đ��Ãrֵ��
|