| �C���p��ʽ����늄әC���O(sh��)Ӌ�c����о�
ꐾSɽ����ϼ����܊��
(�����I���I(y��)��W(xu��)�������������I150001)
ժҪ��������O(sh��)Ӌ��һ�N����ݔ�����C���p��ʽ�в�����늄әC���������乤��ԭ���������ØәC�о����в�����늄әC�ͽM�b����C������늄әC���l���ٶ����ԣ��@���p���X�в�����늄әC���C���p��ʽ����늄әC��****���d�ٶȣ��Ҍ��@�õĂ��ӱȱ��O(sh��)Ӌ����Փ���ӱȴ�ٷ�֮��ʮ�����Y(ji��)������ԓ늙C�܉���ٿɿ����\�С�
0 �� ��
�����ڂ��y(t��ng)��늴�늙C������늄әC���нY(ji��)��(g��u)���Ρ��D(zhu��n)�أ��|(zh��)���ȴ��ٴ�Ť�ص����c���Ɍ��F(xi��n)ֱ���(q��)�ӣ�푑�(y��ng)�죬�܉������i�����a(ch��n)���ň���Ҳ�������ň��ɔ_���܉��m��(y��ng)�ߵ͜���յȐ��ӗl������ˣ�����늄әC���g(sh��)��20���oĩ�õ�Ѹ�ٰl(f��)չ�����ں��պ��졢�C���ˡ���܇�����ܶ�λ�x���͙Cе���I(l��ng)��õ��ɹ��đ�(y��ng)�á�
�mȻ����늄әC���е��ٴ����ص����c����ֱ�����ìF(xi��n)�еij���늄әC�(q��)�ӣ�늙C�D(zhu��n)������߀���^�ߡ���ͨ�^�{(di��o)�l���{(di��o)�����ֶ�ʹ���\���ڵ��٠�B(t��i)���t�����ٶȷ�(w��n)���Բ�Ć��}����˞�@���^���ٵ��(q��)�әC��(g��u)�����Č��C��Ħ������ԭ�푪(y��ng)�����в��ͳ���늄әC�У�������늄әC���C���p������Y(ji��)�ϣ��O(sh��)Ӌ��һ�N�C���p��ʽ����늄әC��������乤��ԭ�������������C���p��ʽ����늄әC�әC��
1�C���p��ʽ����늄әC����ԭ��
l 1�в�����늄әC�\��ԭ��
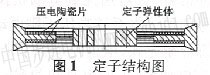
�в�����늄әC�Ķ������ɉ���մɺͽ��ُ����wճ�Ӷ��ɣ������O(sh��)Ӌ���в�����늄әC�����ڶ������±���քeճ�Љ���մ�Ƭ�ĽY(ji��)��(g��u)����D1��ʾ�����ӽ��ُ����w���±���ÿƬ����մ�Ƭ��һ�����Ҳ�늉������һ���v��������Ƭ�մ�
Ƭ�ķֲ��ڿ��g�����1��4���L����Ƭ�մ�Ƭ�ɕr�g�����1��4���ڵă�����l��̖���ÿ�༤��a(ch��n)�����v���B�Ӻ��ڶ��ӵ���A���γɏ����в��������X�˵��|(zh��)�c���E�A�\�ӣ�ͨ�^���D(zhu��n)�ӽ��|�������������(q��)���D(zhu��n)�����D(zhu��n)���D(zhu��n)���D(zhu��n)�ӷ����c�в��Ă��������෴���D2��늙C���в�����ʾ��D��
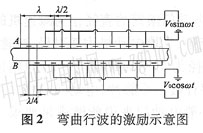
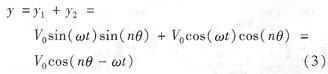
���ϡ����մ�Ƭ̎�քeͨ��V0sin(��t)��V0cos(��t)�ļ�����̖���t����Ƭ����մ�Ƭ����ӷ��̞飺
ʽ�У�V0�鼤��늉���������Ȟ���g�Ƕȣ��؞���ӽ��l�ʣ�t����ӕr�g��
��n�鶨�ӈA��
�ϵIJ���(sh��)���t�Ƀɂ������v�����ɵ��в����Ա�ʾ�飺
1 2�C��Ħ�����ӵ��\��ԭ��
�C��Ħ�����������C���X݆������Փ�Ļ��A(ch��)�������һ�N����Ħ�����M���\�Ӻ̈́������f�Ă��ӷ�ʽ�������C�����Ӻ�Ħ���W(xu��)ԭ��������݆�̈́�݆�����˟o�X�Ĺ⻬���棬������݆�̈́�݆�^ӯ��Ϯa(ch��n)�����^ӯ���a(ch��n)��Ħ������Ҫ�����������Ķ��a(ch��n)���\�Ӻ̈́������f����Ҫ�����ء��������C���X݆���ӣ��C��Ħ�����Ӿ��мӹ����ס��ɱ��͡������^������ӱ��^С��������߂��Ӿ��ȵȃ�(y��u)�c����(d��ng)Ȼ�����C��Ħ���������Ä�݆����݆֮�g���^ӯ��Ϯa(ch��n)����Ħ�������F(xi��n)�\�Ӻ����Ă��ӣ�����O(sh��)Ӌ�r����Ҫ����Փ�ϱ��ℂ݆����݆֮�g���\�ӻ��Ƽ������F(xi��n)��
�в�����늄әC�ͷֲ���A����ĝL���w��ͬ��(g��u)�ɲ��l(f��)������ͨ�^�������в�����늄әC�D(zhu��n)���B�Ӽ���A���ϵ������L���w�D����݆��ʹ��݆�a(ch��n)�������Եď���׃�Σ���݆�̈́�݆֮�gͨ�^Ħ�����|���F(xi��n)�ٶȺ����صĂ��f���Ķ��γɹ̶����ε�����Ħ��ʽ�C��늙C���D3���D(zhu��n)���B�Ӽ�����݆�̈́�݆���b���P(gu��n)ϵ�����D����(d��ng)��݆�̶����D(zhu��n)���B�Ӽ����ӡ���݆��Ąӕr����݆���D(zhu��n)���B�Ӽ��͝L���w�Ĺ�ͬ�����®a(ch��n)��׃�Σ��ں͝L���w���|�c̎�c��݆��ȫ���|���ڛ]�к͝L���w���|̎��݆�̈́�݆��ȫÓ�_���D(zhu��n)���B�Ӽ����B�m(x��)�D(zhu��n)�ӣ����|��Ó�_�ɷN��r����׃����ѭ�h(hu��n)����(f��)��
��(d��ng)���l(f��)�������D(zhu��n)����݆��݆�L�ӣ����o���ӝL�ӣ��t��݆��֮һ��(y��ng)�D(zhu��n)�^һ��ȡ�Q�����L��ĽǶȡ����ڱ��ģ���݆�̶������l(f��)����ݔ�룬��݆ݔ������(d��ng)���l(f��)�������D(zhu��n)һ�ܕr����݆���D(zhu��n)���B�Ӽ������D(zhu��n)�����D(zhu��n)�^�ĽǶȣ�
ʽ�У�db������݆��(n��i)����
dg���� ��݆δ׃���⏽��
��݆�̶������l(f��)����ݔ�룬��݆ݔ���r���C��Ħ�����ӵĂ��ӱȞ飺
ʽ�У�i�����C��Ħ�����ӵĂ��ӱȣ�
dg������݆δ׃����Aֱ����
db������݆��(n��i)�Aֱ����
w0������݆����׃������
2�C���p��ʽ�в�����늄әC�ĽY(ji��)��(g��u)�O(sh��)Ӌ
�����O(sh��)Ӌ���C���p��ʽ����늄әC�����p�F���X�в�����늄әC���L���w�Լ����Ԍ��F(xi��n)�C��Ħ��������݆�̈́�݆���C������늄әC���M�ɲ��ֵ��O(sh��)Ӌ�����Č�һһ�о���
2 1�p���X�в�����늄әC���O(sh��)Ӌ
�������պ�������Ƶ��p���X�в�����늄әC���ѳɹ����ڻ��ǵ�ꑙC���˵��P(gu��n)��(ji��)�(q��)�ӡ��䳬��늄әC�����ӡ��D(zhu��n)�ӣ����D(zhu��n)�ӡ��̶����ӣ�횼�һ����ͨ·�Č�(d��o)늻��h(hu��n)�o�����ϵĉ���մ�ͨ�ԃ�·���l�ʽ�׃늉���̖���Y(ji��)��(g��u)���^��(f��)�s�����Ҍ�(d��o)늻��h(hu��n)������Ħ��������������ϵ�y(t��ng)�Ŀɿ��ԡ������O(sh��)Ӌ���p�F���X�(q��)�ӵ���֧���Sϵ�в�����늄әC���ӹ̶����ӣ��D(zhu��n)�����D(zhu��n)��늙C�Y(ji��)��(g��u)��D4��ʾ��
�������ӡ����D(zhu��n)�ӡ����D(zhu��n)�ӡ������D(zhu��n)���B�Ӽ���Ħ�����Ϻ���˨�����ڶ����O(sh��)Ӌ���p���X�Č��Q�Y(ji��)��(g��u)�����ӵăɂ��X����քe�c�D(zhu��n)�ӽ��|�����������˶��D(zhu��n)���g�Ľ��|��e��������늙C��ݔ�����غ������ܶȣ��Ҷ��Ӳ����S�ض�׃���a(ch��n)����׃�Σ���Փ���p���X����늄әC��ݔ�����ؿ����_�������X����늄әCݔ�����ص�һ���������|(zh��)��ֻ��ߺ�С�����D(zhu��n)�ӽ��|���O(sh��)Ӌ���F����|��
���Ӄɂ�(c��)���F���X���������������ã�(1)���鶨�D(zhu��n)���g��Ħ���(q��)���棻(2)�O(sh��)Ӌ���F��һ���̶��������˶��D(zhu��n)��֮�g�Ľ��|��e���M�������(q��)������(3)�����D(zhu��n)�ӵ��S��֧���棬�����D(zhu��n)���O(sh��)Ӌ�����������D(zhu��n)�����Ͷ����X�����(c��)���F(xi��n)�D(zhu��n)�ӵď���λ���Ķ����F(xi��n)�ˌ��D(zhu��n)�ӵğo�S��֧���c��λ��������D(zhu��n)�����D(zhu��n)�^���������\�D(zhu��n)����(w��n)����ɵĶ��D(zhu��n)��֮�g���F(xi��n)�����F(xi��n)���D(zhu��n)������(c��)��Ͷ����X���(c��)���O(sh��)Ӌ���g϶��
�ڶ��ӈA���p�F����ӹ����X���������ӵęM����ӷ�ֵ���D(zhu��n)���c���ӽ��|�Ķ����N��Ħ�����ϣ�Ħ�������c�����Xֱ�ӽ��|���܉��C���D(zhu��n)���g�Ⱦ������õ��A(y��)�o���ԣ��־����^��ď��ȡ������D(zhu��n)�ӵ��\��ͨ�^�B�Ӽ��B�ӣ��Ԍ��F(xi��n)��ͬ���D(zhu��n)��һ�������˃�Ƭ����մ�Ƭ���քeճ�N�ڶ��ӏ����w�����±��档
2 2�C���p��ʽ����늄әC�ĽY(ji��)��(g��u)�O(sh��)Ӌ
�齵�ͳ���늄әC���\���ٶȣ���չ����늄әC�đ�(y��ng)�÷��������C��Ħ������ԭ�푪(y��ng)�����в��ͳ���늄әC�У��ɳ������l(f��)��������݆�̈́�݆�M�ɵ���ݔ�����C���p��ʽ�в�����늄әC��
�����l(f��)�������p�F���X��֧���Sϵ�в�����늄әC�Ͳ��������D(zhu��n)���B�Ӽ���A���ϵĝL���w�M�ɡ��������p���C�����ӣ������C�����Ӿ��н��|�r���|��e���d���������ԄӶ����Ժá��ز�С���\��ƽ��(w��n)�ȃ�(y��u)�c����˱��ĵij����l(f��)�����O(sh��)Ӌ����й̶����ε������l(f��)�����������C��Ħ��ʽ���ӷ�ʽ�IJ��l(f��)��������݆֮�gͨ�^�L��Ħ������ʽ���f�D(zhu��n)�ٺ����أ���݆��Ҫ����������ء����ĵĝL���w�x�ÝL������ǂ��ӵ������S�У���݆�H��ҪС���������أ������˂��f�^���е������pʧ������˂��fЧ�ʡ�
��݆�O(sh��)Ӌ�鱭�ͽY(ji��)��(g��u)����݆�O(sh��)Ӌ��A�F�Y(ji��)��(g��u)���O(sh��)Ӌ���ӱȞ�100���C���p��ʽ����늄әC�ĽY(ji��)��(g��u)�D��D5��ʾ����݆�����F���O(sh��)Ӌ������ͨ�^�A(y��)�o�����{(di��o)��(ji��)��݆ʹ������݆�S���Ƅӣ����F(xi��n)�˄�݆�c��݆֮�g�A(y��)�o�����{(di��o)��(ji��)��������ӹ����b���`��ʹ��݆�c��݆���|��������|�^�o�����⣬�L���w���������Sͬ�Ķȵ��`���a�������������l(f��)�������D(zhu��n)��֮�g���F���X�挍�F(xi��n)�����C�˸��L��ʩ������݆�đ�(y��ng)������ƽ�⡣ԓ늙C��݆�̶�����݆����Ą�݆��
3����о�
3��1�����迹���Ԝyԇ
���в�����늄әC�b��ǰ������Agilent4294A�迹�����x�y���әC���迹���Ա㌍�r��늙C�ṩ�ʴ_�Ĺ��������l�ʡ��D6���D7�քe��ݔ��늉���Чֵ��O��5V�r����Ƭ�(q��)�Ӊ���մɵ��迹�l���������ĈD�п��Կ������y���ij����Ӄ�Ƭ�մ�Ƭ�Č��H�C���l�ʷքe��26��513 kHz��26��523 kHz���ӑB(t��i)�迹�քe��1��355 k����l 22l k�������迹�����x�y���ă�Ƭ�(q��)�Ӊ���մ�Ƭ�ϵ��C���l�ʡ��ӑB(t��i)�迹����ƫ��@�����ڃ�Ƭ����մɱ����ߴ煢��(sh��)�IJ�Լ��c�����w��ճ���z�Ӻ����һ�������ġ�
3 2����늄әC�ٶ����ܜyԇ
�����������Ƶ��C������늄әC�әC�M�Ќ��yԇ���C���p��ʽ��늙C�әC��Ƭ��D8��ʾ��
���A(y��)�o����5 N���(q��)��늉���100V�r��ͨ�^�{(di��o)��(ji��)ݔ��늉��ļ����l�ʷքe�õ��p���X�в�����늄әC�c�C���p��ʽ����늄әC���D(zhu��n)�ٶ��S�����l��׃����������D9���D10��ʾ��
�D9���p���X�в�����늄әC�әC���l���ٶ�׃���������ĈD�п��Կ���������늙C�b��ǰ����C���l��ֵ�l(f��)����׃�����b���Č��H���C���l�ʞ�26 6 kHz���@��Ҫ�������b����D(zhu��n)�ӵ��A(y��)�o���������C���l�ʮa(ch��n)����һ����Ӱ푣��Ķ�ʹ�C���l���c�����˼sl00Hz��늙C�C��^(q��)�����(c��)���ٶȺܵͣ����_�C��^(q��)���ٶ�Ѹ�����ӣ��^���C��^(q��)���ٶ��½�׃�þ�����
�D10�鿂�b����C���p��ʽ����늄әC���l��һ�ٶ�׃���������D�е������@ʾ���в�늙C�̈́�݆����݆�M�b�Ժ�늙C���C���l��ֵ�l(f��)����׃�������b��Ĺ����C���l�ʞ�26��66 kHz���@��Ҫ �������b�����݆�̈́�݆���|(zh��)���ஔ(d��ng)�ڽo�в�����늄әCʩ��һ����ؓ�d������в�����늄әC�Ĺ����C���l�ʰl(f��)����׃�������^�D9�c�D10��֪����ʩ����ͬ���A(y��)�o�����(q��)��늉�����r�£��p���X�в�����늄әC��****���d�ٶȞ�96 r��min�����b��õ��C������늄әC�Ŀ��d�ٶȞ�O. 8 r��min���ٶȱȞ�120�����O(sh��)Ӌ�Ĝp�ٱ�100��ٷ�֮��ʮ���@��������݆�̈́�݆�ļӹ��`��͜y���`���Լ�Ħ���^���еĻ��ƛQ���ġ�����Ħ���C�����әC��(g��u)�Ă��ӱȵ���Փ��ʽ����֪������݆δ׃���⏽�̈́�݆��(n��i)��?j��ng)Q�������ӱȵĴ�С�������݆�̈́�݆�ļӹ������Լ��y�������������C�����ӂ��ӱ���Փֵ�c�y��ֵ�����Ҫ���ء����⣬Ħ�������^���д��������ɱ������Ħ������׃������ď��Ի��ơ�
4�Y(ji��)�Z
����늄әC���е��ٴ����ص����c�������y(t��ng)����늄әC�ٶ�����߀�^�ߣ���@���^���ٵij���늄әC�����Č��C��Ħ������ԭ�푪(y��ng)�����в��ͳ���늄әC�У�������O(sh��)Ӌ��һ�N����ݔ�����C���p��ʽ�в�����늄әC���p�F���X�в�����늄әC���ö��D(zhu��n)���g�Ľ��|�F�挍�F(xi��n)���D(zhu��n)��ֱ�Ӷ�λ����Q�������S�ж�λ��Ҫ�����Ć��}�����Ӿ����p�F���X�Y(ji��)��(g��u)���������±���������Љ���մɣ�ͬ�rԓ늄әC�����p�D(zhu��n)�ӣ��������r��ݔ�����غ������ܶȡ����ڶ��Ӳ��Ì��Q�Y(ji��)��(g��u)�O(sh��)Ӌ����������늙C�ğ᷀(w��n)���ԡ�
ͨ�^���������Ƶ��C������늄әC���l���ٶ�����׃���Ĝyԇ���@�����p���X�в�����늄әC��****���d�Լ��C������늄әC��****���d�ٶȡ����ڄ�݆����݆�ļӹ������`��͜y�������`���Լ���݆����݆����݆�͝L���w֮�g���ܰl(f��)���Ļ���������`�Ħ�����Ӳ��ֵČ��y���ӱȴ����O(sh��)Ӌ�Ă��ӱȰٷ�֮��ʮ����(j��ng)�^���әC�Č��yԇ�������O(sh��)Ӌ���C���p��ʽ����늄әC�܉�ɿ����ڵ������\�У���˿��ԑ�(y��ng)���ڿ��g�C���ˡ�����܇�Ⱥ��պ����I(l��ng)�����չ�˳���늄әC�đ�(y��ng)�÷�����
|