| ���ڻ�����λ����늄��T�oˢ늄әC�ӿ���ϵ�y
�����A���� ӿ���f���d�����
(1�������I��W��������h430068��2�_������늙C����˾���_��)
ժҪ����B����һ�N����늄��T�Ӽ�����ϵ�y��늄��T�ɟoˢֱ��늄әC�ӣ�c8051F040��Ƭ�C���ƣ��ɟoˢ늄әC����λ����̖���F늄��T�Ķ�λ��
O�� ��
�S�������Ŀ��ٰlչ������늄��T(���º��Q늄��T)��ʹ������V����늄��T�Ďγߴ粻�HԽ��Խ�����������·��ٶ�ҲԽ��Խ�ߡ�����͂}�졢��չ���ĵ�늄��T�����_lO m���߽ӽ�5m���������·��ٶ�Ҫ��1 m��s���ϡ�Ŀǰ늄��Tһ����î���늄әC�ӣ�����ϵ�y��׃�l���Ϳɾ��̿�����PLc���ɣ����þ��a����λ��������֪������늄әCЧ�ʵͣ����a�����b���^�韩��߀��Ҫ�Cе(��늴�)�Ƅ��b�ã�׃�l���;��a���ɱ�Ҳ�^�ߣ��@Щ��ʹϵ�y�ɱ����ӣ�Ӱ�늄��T�aƷ���Ј���������
�����о�һ�N���ڻ�����̖��λ��ϡ�����şoˢֱ��늄әC(���º��Q�oˢ늄әC)�ӵ�������늄��T����ϵ�y�����ȣ��oˢ늄әC���H�������õļӡ��p�����ܣ�����߀�����÷�ӳ늙C�D��λ�õĻ�����̖�팍�F늄��T�Ķ�λ��ʡȥ�˂��y늄��T�еĶ�λ���a����������ϵ�ɽY���������˳ɱ�����Σ��������şoˢ늄әC�ӵ�늄��T���·ŕr늙C��̎��늄��\�Р�B�������ǂ��y늄��T����늄әC����Ҫ���ƄӠ�B���@�����ڟoˢ늄әC�����D�Ӵ��������a�����Ƅ����أ�ͨ�^�p�ٙC�ķŴ��Ƅ������������늄��T���������أ�늄��T�㲻�������������τ�F�ţ���������oˢ늄әC�ķ���늄��\�в��܌��F늄��T��F�����@��ϵ�y���Ƶ��Ժ������������ڂ��y늄��T�б���ЙCе��늴��Ƅ��b�ã����������ⲿͣ늕r���Ƅ��b���ܡ��iס��늄��T���Ա��Cϵ�y�İ�ȫ�����oˢ늄әC�ӵ�늄��T�t��ʡȥԓ�Ƅ��b�ã�����������늕r���oˢ늄әCͨ�^�p�ٙC�Ŵ���Ƅ�����ͬ���ܡ��iס��늄��T��
1ϵ�y����
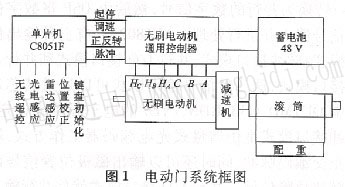
늄��Tϵ�y���ⲿ��̖����Ƭ�C���oˢ늄әC����ͨ�ÿ��������p�ٙC���LͲ����늳صȲ��֘��ɣ�ϵ�y��D��Dl��ʾ��
늄��T��늙C���������_�l��һ�N�߉�ϡ�����şoˢ늄әC����ͨ�ÿ���������D2��ʾ���oˢ늄әC�~������1. 5 kw���~���D��1 800r��min��������ݔ��늉���220 V(����)��ϵ�y���ⲿ
��̖�����o���b����̖����늸Б���̖�����_��̖��λ��У����̖���I�P��ʼ�����I�P��ʼ���������Ǹ���늄��T�IJ�ͬҎ����늄��T���b�r�ɼ��g�ˆT�������P�ą������p�ٙC���ٱȞ�25����늳������ⲿͣ늕r�������Ă����Դ��
�x��cygnal��˾c8051F������ϵ�е�c805lF040��Ƭ�C���鱾ϵ�y�Ŀ���оƬ��c805lFxxx��Ƭ�C������ˮ���Y�����C�������ɘ˜ʵ�12��ϵ�y�r����ڽ���1��ϵ�y�r����ڣ�̎�����������ߡ�Ƭ��߀�����˔����ɼ��Ϳ���ϵ�y�г��õ�ģ�M�����������������O�����ܲ������@�����OӋ늄��TӲ���·�r����Ҫ����̫����ⲿ�·��ϵ�y���Ӻ��Ρ��ɿ���
��Ƭ�C��늄��T����ϵ�y�Ŀ��ƺ��ġ���ؓ؟�z�y�ⲿ��̖�����а��I�����r�����c֮�����IJ�����ʹ늄��T�������½���ͣ�����z�y���ⲿ��������r�r�͈����������Д�̎������늄��T���·��У����_�Б��������Ƅ����w�r��늄��T�Ԅӷ�����픲���
2늄��T�Ķ�λ�cλ��У��
�oˢ늄әCÿ�DһȦ�Ļ����}�_����һ���ģ����p�ٙC���ٱȺ͝LͲ���⏽�_����늙Cÿ��һ���}�_������늄��T���\�и߶�Ҳ��һ���ģ�����ֻҪ�ʴ_Ӌ�������̖���}�_�������ܱ��C늄��T�г̵Ĝʴ_�ԡ������OӋ�r������늄��T���г�Ӌ��������Ŀ������}�_����늄��T�����r��Ӌ�����м�һ���}�_���½��r��Ӌ�����Мpȥһ���}�_��Ȼ���c�K�c�}�_���M�б��^��ֱ����Ȟ�ֹ��
���ڟoˢ늄әC�ӵ�늄��T������Ҫ�~��������a���}�_��̖��ֻ���ßoˢ늄әC�Q������Ļ����}�_��̖���ɡ���ϵ�y�߉��oˢ늄әC����������������B���Ʒ�ʽ��늙C��������������Ԫ�����˴����120o늽Ƕȣ��oˢ늄әCÿ�DһȦ���a���Ļ����}�_��P��
P=6p (1)
ʽ�У�p��oˢ늄әC�ĘO������
�oˢ늄әC��һ�������}�_�����D�����D60o늽Ƕȣ�늄��T���\�и߶ȣ�����λ���Ȟ飺
ʽ�У�D��늄��T�LͲ��ֱ����j��p�ٙC���ٱȡ�
��ϵ�y�У��oˢ늄әC���Č��O���p�ٙC�ٱȞ�25���LͲֱ����133 mm���t늄��T�ľ��Ȟ�O. 69mm��������Ӌ��һ���}�_��늄��Tλ��O��69 mm���˾��Ȍ���һ��늄��T���f�܉�M��Ҫ���@Ȼ�����ӟoˢ늄әC�ĘO�����͜p�ٙC���ٱȣ���pС�LͲ��ֱ�������܉����늄��T��λ�ÿ��ƾ��ȡ�
��Ȼ�������\���^�����}�_Ӌ�����зe���`��籾ϵ�yҪ��늄��T��30 cm����ɼӡ��p�٣��oˢ늄әC�ļ��ٶȺ�����ܴ��^����������������̖�a���ɔ_���z�y�·���ܕ����@Щ�ɔ_��̖������Ч�}�_Ӌ�ˣ�늄��T�\���������ں��۷eƫ��Ӵ�ʹ늄��T���г̰l���^��׃�������˽�Q�@һ���}��늄��T��߀�b�л���У���b�ã�늄��T�������½��r�����Ԅ��M��λ��У�����Ա��C늄��T�L���\�в������Fλ��ƫ�
3ܛ���OӋ
늄��T����ϵ�y��ܛ������ģ�K���OӋ��������ֻ�nj��ӳ����M���{�ã����w�������ӳ�����С��ӳ�������������ӳ����г̳�ʼ���ӳ��o���b���ӳ����\���ӳ���ֹͣ�ӳ���ͣ�ӳ��V���ӳ����@ʾ�ӳ����λ��У���ӳ���
3��1������
���������̈D��D3��ʾ�����������У��������ӡ��\�С�ͣ܇��B�⣬߀��һ��������B���@����Bֻ�ǵȴ����T����ֹͣ������Ƭ�C�sһֱ���\�У���횽oһ�����e��B��Ƭ�C�ȴ����
3 2�����ӳ���
�����^���У��oˢ늄әC�D�ٵĽ���ʽ��
ʽ�У�nL���D�ٷ��Bֵ��TM���τ�ϵ�y�C늕r�g������
���ˌ��F�oˢ늄әC�ĺ�������ӣ���Qܛ���ӣ����ӳ���ģ�M��ݔ��ʽ(3)��������������������500���c�M�϶��ɡ�ģ�M�D���������P�I�ǙC늕r�g�����Ĵ_��������ͨ�^��ʽӋ�㣬Ҳ����ͨ�^ԇ�yԇ�õ����D4�������ӳ������̈D��
3��3�г̳�ʼ���ӳ���
c8051Fϵ�І�Ƭ�C��Flash ROM�����S�ڳ����\�ЕrӋ��ʹ惦��Ƙ˶�ϵ���@�ӵĔ������@�ӿ��ڲ�֪��늄��T�Ĝʴ_�߶ȕr���F�����ϻ�������Iʹ늄��T�����\�У��Ԅӂɜy늄��T�ĸ߶ȣ������Ԅӌ��߶Ȕ������浽Flash ROM�У��Ժ����㰴�˸߶��\�С�ͨ�^���ӳ���Ĉ��У�����Դ����׃�ėl���M�㲻ͬҎ��늄��T��Ҫ��
3��4�o���b���ӳ���
���@���ӳ����У����]��ʹ���ߵ�һЩ�`��������늄��T���������½��^���У�ʹ���߰���ͣ�I��Ч��늄��T��ͣ�����������I�oЧ��늄��T�o������ʹ�����B�m��ͬһ�����IҲ�oЧ���T������픲�ֹͣ��ʹ�������ٰ������I�����������ǣ��˕rֻ�а��½��I늄��T�ŕ������\�С�
3 5�V���ӳ���
��ǰ������늄��T���\�кͶ�λ�ǽ����ڻ�����̖�}�_�ʴ_Ӌ���Ļ��A�ϵġ�Ȼ����ϵ�y�{ԇ�^���У�������̖�����ɔ_���e����늙C�������ӕr���Ӈ��ء�������ͨ�^���r���V�����l�ɔ_�������ɔ_��̖�l�ʸ��ڶ��r����Ӌ���l�ʕr�ͱ��V��������V���h�����}�_Ӌ���ʴ_�Դ����ߣ��г̸��Ӝʴ_��Ч�����^���롣
4�Y�Z
�c�F��늄��T��ȣ����ڻ�����λ�����ßoˢ늄әC��늄��T�ă���ʮ�����@���@�N늄��Tϵ�y�Y�����Σ����ڿ��ƣ��ɿ��Ըߣ��ɱ��^�ͣ���һ�N���ԃr�ȵ�����늄��T��ϵ�y�{ԇ��ԇ������늄��T�OӋ�����Ǻ����ģ���ȫ�M���Ñ�Ҫ��
�����īI
[1] �f�W�����I�����T����ϵ�y[J]�C�һ�w����2005(4)��72��73
[2]�����A���f���d���䝍��l. 5 kw�߉�Ԫˢֱ��늄әC���������������[c]��ʮһ���Ї�С늙C���g��ӑ��Փ�ļ� |