| ����VISSIM��BUCK׃�Q����ģ����
���(gu��)�����o(j��)־��
(���ϴ�W(xu��)�����K�o(w��)�a214122)
ժҪ������(j��)Dc��Dc׃�Q���Ļ���ԭ��������V1ssIM������BucK׃�Q���ķ���ģ�ͣ������p��ģ����Ʒ�������(n��i)�h(hu��n)��ģ������������ƭh(hu��n)����h(hu��n)��ģ������늉����ƭh(hu��n)����������Y(ji��)���cPI���Ʒ�ʽ����^������Y(ji��)�������˻�ģ���Ƶă�(y��u)Խ�ԣ����о�BucK׃�Q���Ļ�ģ�����ṩ���·�����Ҳ���M(j��n)һ���о�����Dc��Dc׃�Q���Ļ�ģ�����ṩ����˼·��
O�� ��
Dc��Dc׃�Q���֞�PwM�ͺ��C���͡����IJ���PwM��BucK׃�Q������ͨ�^(gu��)��׃ռ�ձȁ�(l��i)�{(di��o)��(ji��)׃�Q����
Ŀǰ����(du��)��BucK׃�Q�����]�h(hu��n)���Ʒ�������Ҫ��늉��ͺ�����͡�늉��Ͳ���ݔ��늉�?ji��n)έh(hu��n)���ƣ�������Ͳ���늸������ݔ��늉��p�h(hu��n)���ƣ����·�Ы@�ø������Ϣ������Ч���^�á�
��(du��)��������p�h(hu��n)���ƣ����õĿ������ܶ࣬���������PI��������ģ������������ģ�����������@���N�������У�PI�������Y(ji��)��(g��u)******���������_��(d��ng)Ӱ��^��ģ�����������O(sh��)Ӌ(j��)ģ��Ҏ(gu��)�t�����Y(ji��)��(g��u)��(f��)�s����ģ���ƾ��к�(qi��ng)�������ԣ����������_��(d��ng)��Ӱ푣�����Ч���ã���E}�������O(sh��)Ӌ(j��)����(du��)ģ�������^��(ji��n)�Ρ�
����(du��)��BucK׃�Q���Ļ�ģ���ƣ�һ��֞�r(sh��)��׃�͕r(sh��)׃�ɷN��ģ�档���У��r(sh��)׃��ģ���nj�׃�Q������(sh��)��׃�����뵽�ГQ�棬����(j��)׃�Q������(sh��)��׃�����������ГQ�棬�Y(ji��)��(g��u)�^��(f��)�s�����r(sh��)��׃��ģ�������O(sh��)Ӌ(j��)�r(sh��)�_����ģ���ϵ��(sh��)��
�C�ϱ��^���N���Ʒ��������IJ��Õr(sh��)��׃��ģ��Ŀ��Ʒ�����VIssIM��һ�N����(qi��ng)��������Ӻ��Ԅ�(d��ng)���ƽ�ģ�ͷ���ܛ����ԓܛ���܉��ṩ�Ѻõ��Ñ����棬���������S���Ŀ���Ԫ����(k��)�͏�(qi��ng)��Ĕ�(sh��)�W(xu��)�\(y��n)��ģ�ͣ�߀�Ɍ���������ܛ���е�Ԫ���������D(zhu��n)����ͨ�Ô�(sh��)�W(xu��)ģ�ͣ����܉��cc++��DsP�ͼ��ɵ�Matlahģ�K������ͨ�^(gu��)��VIssIM����BucK׃�Q���Ļ�ģ����ģ�ͣ��Ɍ���ģ���������������_(k��i)�P(gu��n)�����I(l��ng)�錍(sh��)�H�_(k��i)�P(gu��n)���Ƶ��O(sh��)Ӌ(j��)�ṩ����˼·��
1 BuCK׃�Q���Ĕ�(sh��)�W(xu��)ģ��
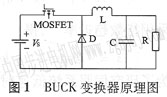
BucK׃�Q��ԭ��D��Dl��ʾ��
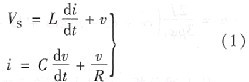
ȡ늸����i�����늉�v���B(t��i)׃������(y��ng)��KvL��KcL(��������늉����������)���ɵ��_(k��i)�P(gu��n)�܌�(d��o)ͨ�r(sh��)���ַ��̣�
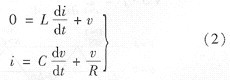
ͬ�����ɵó��_(k��i)�P(gu��n)���P(gu��n)���r(sh��)���ַ��̞飺
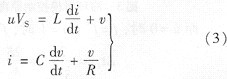
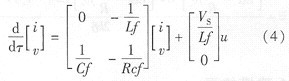
ʽ(I)��ʽ(2)�ϲ��ɱ�ʾ�飺
ʽ�У�Vs���Դ늉���L��늸�ֵ��c�����ֵ��R�����ֵ��f���_(k��i)�P(gu��n)�l�ʣ�u������ʣ�u=l�r(sh��)���_(k��i)�P(gu��n)���_(k��i)ͨ��u=O�r(sh��)���_(k��i)�P(gu��n)���P(gu��n)�ࡣ
ͨ�^(gu��)�D(zhu��n)�Q���Ø�(bi��o)��(zh��n)��������=ft���ɵ�����ģ�ͣ�
2�p�]�h(hu��n)����
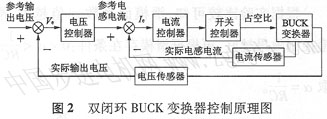
�D2��BucK׃�Q��������p�]�h(hu��n)����ԭ��D��BucK׃�Q����ݔ��늉�����ֵ�c��(sh��)�Hֵ��ƫ��ͨ�^(gu��)늉��������õ�늸����������ֵ��ԓֵ��(j��ng)�^(gu��)����������c늸������(sh��)�Hֵ����^�a(ch��n)���`��ֵ����ͨ�^(gu��)�_(k��i)�P(gu��n)�������a(ch��n)��BucK׃�Q���_(k��i)�P(gu��n)�ܵĿ�����̖(h��o)���{(di��o)��(ji��)늸������ݔ��늉�ֵ����Kʹ늸������ݔ��늉�ֵ��څ�ڷ�(w��n)�B(t��i)ֵ��
�ڂ��y(t��ng)��������p�]�h(hu��n)�����У�늉�����������PI��PID�{(di��o)��(ji��)�����������������һ��(g��)�p����������h(hu��n)��(ji��)���_(k��i)�P(gu��n)������һ���x��PwM����h(hu��n)��������
3��ģ����
20���o(j��)60�����ǰ�K(li��n)�W(xu��)��s��V��Emelvanov��v��I��utkin�������׃�Y(ji��)��(g��u)����(���º�(ji��n)�QVsc)������Vsc�c��Ҏ(gu��)����ϵ�y(t��ng)�IJ�֮ͬ̎����ϵ�y(t��ng)�ġ��Y(ji��)��(g��u)��������˲׃�^(gu��)���У�����(j��)ϵ�y(t��ng)��(d��ng)ǰ�Ġ�B(t��i)(ƫ�����A��(d��o)��(sh��)��)�����S׃��ʽ����Ŀ�ĵ�׃������ʹϵ�y(t��ng)���A(y��)���Ļ���(d��ng)ģ�B(t��i)�\(y��n)��(d��ng)�������们��(d��ng)ģ�B(t��i)���Ќ�(du��)�ɔ_�c�z��(d��ng)�IJ�׃�ԣ��@ʹ��Vsc���п���푑�(y��ng)����(du��)����(sh��)�����_��(d��ng)���`�����o(w��)��ϵ�y(t��ng)�ھ����R(sh��)�����팍(sh��)�F(xi��n)��(ji��n)�εȃ�(y��u)�c(di��n)��20���o(j��)80����Ժ���u�ܵ���ҕ��
һ��Ļ�ģ���ư�����ģ���O(sh��)Ӌ(j��)�Ϳ������O(sh��)Ӌ(j��)�ɲ��֣�����(du��)��BucK׃�Q�����������uֻ��ȡ0��l���ʌ�(du��)�们ģ�����O(sh��)Ӌ(j��)��Ҫ�����ڻ�ģ���O(sh��)Ӌ(j��)�ϣ�����(du��)�ڻ�ģ���O(sh��)Ӌ(j��)���Іλ�ģ��0���p��ģ��ɷN�������Æλ�ģ�淽�����Ε�(hu��)���^��ĸ��l����****�ķ����Dz����p��ģ�档
���ĵ��p��ģ����Ʒ����c������p�]�h(hu��n)������ƣ���h(hu��n)��늉��h(hu��n)��늉��������x�û�ģ����������(n��i)�h(hu��n)������h(hu��n)�������������һ��(g��)�p�������_(k��i)�P(gu��n)�������ɻ�ģ����Ҏ(gu��)�t�Q����
3 l��ģ���O(sh��)Ӌ(j��)
����(j��)BucK׃�Q���Ġ�B(t��i)���̣�ȡ늸���������늉�(�cݔ��늉����)���B(t��i)׃�������߷քe������ģ�淽�̡��p��ģ�淨�c�p�]�h(hu��n)���Ʒ���ƣ���h(hu��n)��ݔ��늉����ƭh(hu��n)�����Cݔ��늉�څ������ֵ����(n��i)�h(hu��n)��늸�������ƭh(hu��n)�����C늸����څ������ֵ��
��늸����ֵ��������ֵ�cݔ�����ֵ֮�ͣ�����h(hu��n)�Ļ�ģ��s1��ݔ������늸��������ֵ�c��(n��i)�h(hu��n)�Č�(sh��)�H늸����ֵ����^����ӿ�ݔ��늉����Ք��ٶȣ����O(sh��)Ӌ(j��)��h(hu��n)��ģ��r(sh��)���ñ����e������ʽ�������h(hu��n)��(ji��)ʹݔ��늉���(sh��)�Hֵڅ������ֵ���e�֭h(hu��n)��(ji��)�Á�(l��i)�a(ch��n)��늸����������ֵ���֭h(hu��n)��(ji��)�Á�(l��i)�A(y��)�y(c��)�`��׃�����ʿɵÃɂ�(g��)��ģ�淽�̞飺
3 2��ģ�淀(w��n)���Է���
��ʽ(5)�ɵã�
�O(sh��)ݔ��늉�����ֵu,��׃���t��
�t��(d��ng)��h(hu��n)�l(f��)����ģ�\(y��n)��(d��ng)����s1=O�r(sh��)��
��ֻ��ȡ��
����ʹi=x1����s2=O����(n��i)��ģ�h(hu��n)�a(ch��n)����ģ�\(y��n)��(d��ng)��
��ʽ(4)�ɵã�
����(j��)��ģ��׃�ԗl��S=0��L=0���ɵã�
��ʽ(6)����ʽ(7)�ɵã�
����(j��)ʽ(8)�ɵã�
��(d��ng)0<a��1/RC,ueq>0���˕r(sh��)��ģ����ڡ�
3��3��ģ�������O(sh��)Ӌ(j��)
����(j��)��ģ�淽�̿�֪����(d��ng)��ģ��s>0�r(sh��)��ݔ��늉���늸����������ֵ���ڌ�(sh��)�Hֵ����(y��ng)�_(k��i)ͨ�_(k��i)�P(gu��n)�ܣ���(d��ng)��ģ��s<O�r(sh��)��ݔ��늉���늸����������ֵС�ڌ�(sh��)�Hֵ����(y��ng)�P(gu��n)���_(k��i)�P(gu��n)�ܡ�����(sh��)�H��ϵ�y(t��ng)�{(di��o)��(ji��)������һ��(g��)����(y��ng)�r(sh��)�g��
��(j��)�˿ɵû�ģ������Ҏ(gu��)�t�飺
�������һ��(g��)���h(hu��n)���������黬ģ�����ʡ�����(j��)Lyaunov�Дව(w��n)���Եڶ������ɵû�ģ�����ʴ��ڗl���飺
 ��ʽ(4)��ʽ(9)����ʽ(10)����׃?y��u)�?/DIV>
��(du��)�ڜ��h(hu��n)��ģ���ƣ���D3��ʾ��ȡ���h(hu��n)������ģ��t��
4��ģ����
����(j��)����������������D4��ʾ���]�h(hu��n)����ģ�͡����慢��(sh��)�飺ݔ��늉�12 V��ݔ��늉�����ֵ5V��늸�L=200��F�����c=47��F���_(k��i)�P(gu��n)�l��f=5 000Hz��
����(j��)��(sh��)�(y��n)���^��֪����ģ��ϵ��(sh��)��ֵԽ��ģ����Ч��Խ�ã��ٸ���(j��)��ģ���ڗl����0<��<1/RC,ȡ��=1/RC.����(j��)ʽ(11)�ɵã����h(hu��n)�����đ�(y��ng)��35/24�����˕r(sh��)PI���Ʋ��Ք����ʌ��_(k��i)�P(gu��n)�l�ʷŴ�ȡ�Ğ�35/240��
�D4��׃�Q��BucK��BucKl�ĽY(ji��)��(g��u)��ͬ�����(n��i)���Y(ji��)��(g��u)��D5��ʾ��Kֵ��׃ؓ(f��)�d��׃��ϵ��(sh��)��
���(y��n)�C��ģ���Ƶă�(y��u)Խ�ԣ��O(sh��)Ӌ(j��)�˻�ģ��PI�ɷN��������������Ч���M(j��n)���˱��^����D6��ʾ��PI�����������p�]�h(hu��n)���ƣ���h(hu��n)��ݔ��늉��h(hu��n)����(n��i)�h(hu��n)��늸�����h(hu��n)����ʹ��ģ���Ƹ��õ��cPI�����M(j��n)�нY(ji��)�����^���������ÃɷN��������r(sh��)�H��Q��늉����ƭh(hu��n)��(ji��)��PI���Ƶı���ϵ��(sh��)0��8���e��ϵ��(sh��)2����ģ�������Y(ji��)��(g��u)��D7��ʾ�����黬ģ�����ʵĜ��h(hu��n)����ģ����D8��ʾ��
5����Y(ji��)��
����(j��)���Ϸ����D����y(c��)ԇPI���ƺͻ�ģ���ƵĿ��_�ԣ�ؓ(f��)�d���R��ʼֵ��2��5 ������7 s�r(sh��)ͻ׃?y��u)? ������13 s�r(sh��)��ͻ׃?y��u)?��5 �������ĵ�BucK׃�Q�������˘�(bi��o)��(zh��n)����ģ������������r(sh��)�g�Ŵ��ˣ��ʷ���r(sh��)�g�^�L(zh��ng)�����ÃɷN�����ķ��沨����D9��11��ʾ��
����(j��)�ɽM���Ό�(du��)�ȿ��Կ�������ģ���Ƶ����늉������ܿ��ٷ�(w��n)������(w��n)�B(t��i)ֵ����(d��ng)ؓ(f��)�d���׃���r(sh��)����ģ�������늉����β���(d��ng)�^С���ұ�PI���Ƹ���֏�(f��)����(w��n)�B(t��i)ֵ����PI�����У�����ϵ��(sh��)Խ������ؓ(f��)�d�_��(d��ng)�r(sh��)늉�����׃��ԽС�����֏�(f��)������ֵ���ٶ�׃������Ӵ�e��ϵ��(sh��)����ʹ�֏�(f��)�ٶ�׃�졣
��ģ׃�Y(ji��)��(g��u)���Ƶ���Ҫȱ�c(di��n)�Ǵ��ڡ����F(xi��n)���@���ɿ���Ҏ(gu��)�ɵ��_(k��i)�P(gu��n)��ʽ?j��ng)Q���ġ���������r�£���ģ�\(y��n)��(d��ng)�܉��(y��n)����ѭ����(d��ng)ģ���̣��\(y��n)��(d��ng)������ƽ���ģ������F(xi��n)����F(xi��n)����׃�Y(ji��)��(g��u)��Ҫ�M(j��n)���ГQ��ֻ�Ю�(d��ng)�ГQ�](m��i)���ӕr(sh��)�������ГQ�l�ʟo(w��)�ߕr(sh��)����ʹ��ģ�\(y��n)��(d��ng)�����F(xi��n)����
���沨�α��������ĵ��p��ģ����Ʒ����Ȇλ�ģ�淽������������Ϣ����������Գ��^(gu��)P1���ƣ��o(w��)���@�ĸ��l����F(xi��n)��
6�Y(ji��)�Z(y��)
���ĸ���(j��)BucK׃�Q���Ļ���ԭ�������\(y��n)�à�B(t��i)���̷�������BucK׃�Q����(sh��)�W(xu��)ģ�͵Ļ��A(ch��)�ϣ��O(sh��)Ӌ(j��)��һ�N�p��ģ���]�h(hu��n)���Ʒ��������������Y(ji��)���cPI���Ƶ�Ч������^������Y(ji��)����������ģ���ƵĿ��_�ԣ����ٷ�(w��n)���Զ���PI����Ч���á����ڲ����p��ģ����ƣ������ˆλ�ģ����ƕr(sh��)��������l����̫����L(zh��ng)�r(sh��)�g�o(w��)����(w��n)���Ć�(w��n)�}��
��(du��)��BOOsT��BucK��BOOsT׃�Q������������׃���Dz��B�m(x��)�ģ����p��ģ�淽��ֻ�m����BucK׃�Q������BOOsT��BucK��BOOsT׃�Q���Æλ�ģ�淽�����Ε�(hu��)���^��ĸ��l����
|