| ��ģ׃�Y�������ڵ��ٽ����ŷ�ϵ�y�đ���
�����|����܊����îȪ
(���A��W���Ĵ��ɶ�610039)
ժҪ������MATLAB�����OӋ��ģ׃�Y����������ͨ�^�ڵ����ŷ�ϵ�y�еķ���ԇ�c����PID���������^����C�˻�ģ׃�Y�������������^�õؽ�Q���ٶ����І��}��
0�� ��
�S����ӡ�Ӌ��C������댧�w��늙C���켼�g�ľ��M���������ŷ��\�ӿ���ϵ�y������죬���ø��ӏV�����e������ͬ��늄әC�ŷ�ϵ�y��������֪�������ŷ�ϵ�y�е�늙C��һ���Ǿ��ԡ�����ϼ��r׃�ԵĿ��ƌ���֮ϵ�y�\�ӕr���ܵ���ͬ�̶ȵĸɔ_�������c�黬ģ׃�Y���������ṩ������֮�ء�׃�Y��������һ�N�Ǿ��Կ��ƣ�����푑��ٶȿ졢��ϵ�y�������ⲿ�ɔ_�ʲ�׃�ԣ����û�ģ���Ʒ�ʽ������ϵ�y��B׃�������˞��OӋ����܉�E���������c���Ķ�ʹ��ϵ�y�ڻ�ģ�����\�ӕr���б������Ը��Ӄ�Խ�IJ�׃�ԣ��ɱ��Cϵ�y�ǝu�M�����ģ����㷨���Σ����ڹ��̌��F���������ڶ���Ŀǰ��������W������׃�Y�����g�����һЩ�����ŷ�ϵ�y���Ʋ��ԣ������īI[3]������Ƿe��׃�Y�����Ʒ������īI[4]�о��˻��ژO�c���õĻ�ģ׃�Y�����ƣ��īI[5]������ģ���c��ģ������Y�ϵIJ��Եȡ�����ᘌ������ŷ�ϵ�y�ڵ��ٕr��λ�ÿ��������һ�Nָ��څ���ʵĻ�ģ׃�Y�����Ʒ�����ֻҪ�����x����m�����H�ܱ��Cϵ�y����ģ�\�ӵĿ����Լ������������ܣ��ֿ��Ԝp��ϵ�y�����r���Ǝ����IJ���Ӱ푡����o����
���挍���C����������c��Ч�ԡ�
1�ŷ�ϵ�y���ٕr��Ħ��ϵ�y
Ħ����Ӱ�ϵ�y�������ܵ���Ҫ���أ����������ϵ�y�ķ��B�`�߀ʹϵ�y�a�����С���ʎ�����F���صķǾ��ԬF�Ŀ��ƵĽǶȁ��f�������ģ׃�Y�������Ǟ��˿˷��Cе�ŷ�ϵ�y��Ħ���h������IJ���Ӱ푡����ڙCе�ŷ�ϵ�y��Ħ���h�����a������Ӱ푣�
(1)���ٶȕr���ڵ��o�BĦ����ʹϵ�y푑����F�����^���ԣ�ϵ�y���B푑����ж���ƽ���c����һ�l���Σ�ʹϵ�y���ںܴ���o�B�`�
(2)��ݔ��λ�Þ�б����̖�r��ϵ�y�����F�o���ӡ��o���ӵ����S�\�ӣ����������еĬF��
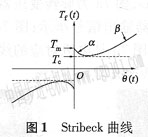
(3)�����ٶȕr�������o�BĦ�������B�m�ģ����Ҷ�ֵ��ʹϵ�y���ٶ��^��r���\�Ӳ�ƽ�������Fƽ픬F���ñ��^****��Ħ��ģ��stribeck�����������ŷ�ϵ�y��Ħ���h����Ӱ푡��D1�����ڲ�ͬ��Ħ���A�Σ�Ħ�������c�ٶ�֮�g���Pϵ��
stribeckĦ������ģ�Ϳɱ�ʾ����
������(t)��<a�r���oĦ�����؞飺
ʽ�У�T(t)�������أ�Tm��****�oĦ�����أ�T����Ħ�����أ���(t)���D�ӽ��ٶȣ����ͦ�dz�С����������
2�ŷ�ϵ�y��ģ�������OӋ
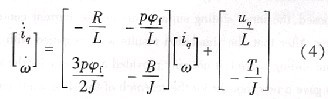
�@�����D�_�ŷ�ϵ�y����ͬ��늄әC�������ڲ�Ӱ푿������ܵ�ǰ���£�����i=0��ʸ�����Ʒ�ʽ���˕r����ͬ��늄әC�Ľ����B���̞飺
ʽ�У�R���@�M��Ч��裬L���@�M늸У�p��O�������؞��D�ӽ��ٶȣ��՞��D�Ӵň���Ч��朣�i��q�S�����u��g�S늉��������D�ӑT����B��ճ��Ħ��ϵ����T1��ؓ�d���D�ء������ŷ�ϵ�y�ĽY�����Ox1=�ȣ�x2=x1=�أ�i=u���t����ͬ��늄әCλ�à�B���̿��������£�
���x��ۙ�`��飺
e=��r-��
���У���r��o��ֵ���t�OӋ�ГQ�����飺
��ʽ(6)��ʽ(8)�ã�
����ָ��څ���ʣ��ã�
�����о��ŷ�ϵ�y���ٕrĦ�����،�ϵ�y��Ӱ푣���T1=Tr(t)+T1(ؓ�d�D��)����ʽ(8)��ʽ(9)�Ķ��õ���
�������������ɵ�����ͬ��늄әC�ŷ�ϵ�y�ڵ��ٕrλ�ÿ��ƽY������D2��ʾ������MArLAB������ģ�������Ĕ��Wģ��ʽ(10)��Ħ�������Ĕ��Wģ��ʽ(1)��ʽ(3)���Ķ��õ���ģ׃�Y�������ڵ����ŷ�ϵ�y�ķ���ԇ���ѻ�ģ�������Č���HD���ƵĔ��Wģ��ʽ(11)������PID�����ڵ����ŷ�ϵ�y�ķ���ԇ
 3����ԇ� ����늙C�����飺�D�ӑT��J=0��8 x10-3kg��m2��ճ��Ħ��ϵ��B=0��01���D�Ӵň���Ч��朦�=O. 2 wb���O����p=4��****�oĦ������T=0��4 N��m�����Ħ������T=O��2 N��m����=O��01����=O��1��10��ϵ�y�o����̖���(t)=O��1 sin(2��t)�����û�ģ�������r��ԇ���Kȡc=30����=lO��k=5����PID���ƕr��
����ָ��څ���ʺ��ГQ�����еą����š�k��c���x��]�й̶��ķ�����һ����f���pС�ţ�����k��ʹڅ���ٶȼӿ죬����������s=O�r��ʽ(7)�Q���ГQ��������c���xȡ���Q��׃�Y��ϵ�y�ĝu�M�����ԡ��ڽ�������ͬ��늄әC�ŷ�ϵ�y���Wģ�͵Ļ��A���M���˔��εķ���ԇ��C�˻���ָ��څ���ʵĻ�ģ׃�Y�����Ʒ����Ŀ����ԣ��������������@Щ����ԇ��õ����^�����һ�M�����^�D3�͈D4���Կ�������λ�ø�ۙ��Ч����PIDλ�ø�ۙ���F��ƽ픬F����ģ׃�Y������λ�ø�ۙ�ںܶ̕r�g�Ȏ��_��һ�£��D5�͈D6�ǃɷN�������ٶȸ�ۙ��PID���������ٶȕr���F�����ЬF��
��ģ׃�Y���������ٶȸ�ۙ�r�mȻ���F���ӵ��������@���f������ָ��څ������Ч��������׃�Y�������Ķ����}���_�����A�ڵ�Ч�����܉�ܺõؽ�Q���ٶ����І��}��
4�Y�Z
��Փ�����ͷ���Y������������ָ��څ���ʺͻ�ģ׃�Y��������Y�ϵķ������ڵ����ŷ�ϵ�y������ͬ��늄әCλ�ÿ��Ʋ��H�˷��˽���PID���Ƶ�ȱ�ݣ����ҿ�����Ч������׃�Y�����펧���Ķ����}��ϵ�y푑��ٶȿ죬�o���{��λ�ÿ��ƾ����^�ߣ����_���A�ڵĿ���Ч���� |