����DSP�ďͺτ�ź㉺ͬ���l늙C������
���Է壬�����֣�����
(�������I��W���������710072)
ժҪ��ͨ�^���Ô���늉��{�������ͺτ��ͬ���l늙C�M�����m�����ƣ����F�l늙C�ĸ߾��ȷ���ݔ���������ˏͺτ��ͬ���l늙C�Ĺ���ԭ�����OӋ��һ����DsP2407����ƺ��ĵďͺτ��ͬ���l늙C�����������������·������·�Ϳ����·�M���˷������OӋ������ԓ���·�M����ԇ�yԇ������ָ�˷���Ҫ��
�P�I�~���ͺτ�ţ�ͬ���l늙C��DsP2407��������
�ЈD���̖��TM341 �īI���R�a��A ���¾�̖��1004��7018(2008)06��0042��04
0�� ��
����DsP�ďͺτ�ź㉺ͬ���l늙C��늙C�������Ӽ��g����������̎�������²��ϵȼ��g��һ�w���Ǽ��и߿Ƽ��������Ј�ǰ�������͙C�һ�w���aƷ���c���y�İl늙C��ȣ�����ָ���@����ߡ�ԓ�N�l늙C늉��{���ʺ�С�����нӽ�ˮƽ�������ԣ�ȫ�Ԅ��{�����ɄӑB���r�{��ݔ�����ʣ��l늙C�m��ؓ�d���������^�d������������Ч�����@�����@�����ƹ��Ʒ�|����߹��ϵ�y�Ŀɿ��ԣ�ʹ��ͬ�����ؓ�d֮�g����ɔ_��Ӱ푽��͵�****�ȣ���δ���l늙C�lչ����Ҫ����֮һ��
�����OӋ��һ����DSP2407����ƺ��ĵďͺτ��ͬ���l늙C��������DsP2407�����r̎�������Ϳ��������O���ܼ���һ���������`���ָ����Ȳ������`���ԡ����ٵ��\�����������M�IJ��нY������Ч�ijɱ��������ϵ�y�����ṩ��һ������Ľ�Q���������⣬��+27 V�͡�13 V�������·����13 V�о��{���·��������·�Ϳ����·�M���˷������OӋ������ԓ���·�M����ԇ�yԇ���yԇ�Y������ϵ�y����ָ��Ҫ��
1 �ͺτ��ͬ���l늙C
ͬ��늙C��Ҫ�����l늙C�����r�I���a���ճ����������õ����һ�������ͬ���l늙C���o�ġ��F�ڏV�����õ�����ͨ��늄��ͬ���l늙C���@�N�l늙C�Ĵň����ƿ��Է����ͨ�^���������{���팍�F��ݔ�����r���^�ã����\��Ч�ʵ͡����Űl늙C�Ƴ��Ժ��y���{���ň��Կ�����ݔ��늉������������Ų��ϵĜض�ϵ���^������ԭ�әC��ؓ�d���߭h���ض�׃���r������l늙Cݔ��늉��IJ��ӣ�Ӱ�ؓ�d�������������Ķ����������đ��÷�����
���m���ͺτ�ź㉺ͬ���l늙C�ij��F���^�õؽ�Q�����Űl늙C��늉��y���{�������y���C�������Űl늙C��늄�Űl늙C�����c��ʹ�ɷNģʽ���ݻ��a���Ķ��@�Ã�Խ�����ܡ�����ϡ�������w���иߴ��ܷe�߳C�B�����e�Ǹ߃ȷA�C�B��������ϡ�����ź���������϶���ܣ��Ķ��sС늙C�w�e���p�p�|������߹����|���ȡ�
�ͺτ��ϡ������ͬ���l늙C��һ�N�ܽ�Q���Űl늙C늉��{�����}�����Ͱl늙C���@�N�l늙C���Կ������Ƀɲ��ֽM�ɣ���Ҫ���ֺ�ϡ�����Űl늙C��ͬ���Q�����l늙C���֣����o���{��늉��IJ��������늄�Űl늙C���Q���o��늄�Ų��֡��ɲ��ֹ���һ��늘��@�M�����l늙C���ֳГ���Ҫ������ݔ���΄գ�늉��{������Ҫ�Ĵň�׃���������o��늄�Ų��ֵ�늄���@�M�팍�F���@�N�ͺτ��ϡ������ͬ���l늙C�����������c��
(1)�o��늄�Ų��ֵēp��С���������Űl늙C�ĸ�Ч�����c��
(2)�ň��{�����㣬��Q�����Űl늙C늉��{���y�Ć��}��
(3)��������늄�Űl늙CС�ö࣬��œp��С��
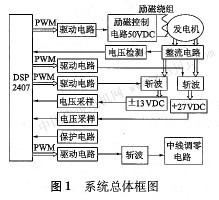
2ϵ�y���w�OӋ
�Dl��ϵ�y���w��D���ڱ�ϵ�y�У�ͨ�^����ϵ�y�Ĺ��ܺͱ��^��̎���������ܵȣ���Kϵ�y�x��DSP2407�������ϵ�y�ĺ��ġ������·����Ҫ������ͨ�^���l늙Cݔ������������ݔ�����M���ھ��y�������ھ��y��ֵ����DsPA407�M�Д���̎�����Ķ����l늙C�Ą�ż��������е����������·�f�{���ƣ����F�]�h�����C�ڿ�׃ؓ�d�l���¾��ܱ���ݔ��늉�������׃������O��ʼ�K������****��B��
3������Ӳ���OӋ
3��1 DSP��Сϵ�y������·
�ڱ���Сϵ�y�У��x��DSP2407�������ĺ�����������Դ������l�ʞ�10 MHz��4���l֮��DSP2407�����_������****�����l��40 MHz����D2��ʾ��JTAG�ڿ��Ԍ��FDSP2407���ھ����档����DSP2407���ø������o�BcMOs���g��ʹ�ù��늉�����3��3 V���pС�˿������Ĺ��ģ�ͬ�r��U�惦���rҲ���x��3��3 v��늵Ĵ惦������ϵ�y�x����IS61LV6416��IS61LV6416��3��3 V��늡�64 k����cM0s�o�B�����惦����****���_8 ns���������о��{���·�е��о�늉��п��ܞ�����Ҳ�п��ܞ�ؓ������DSP22407�Ȳ��Ԏ���A��D�D�Q����ݔ�뷶����O��3��3 V�����Բ�����늉�ݔ�뷶����-lO��lO v��AI)7862�M��ģ���D�Q֮��������DSP2407��AD7862�Ĺ��늉���5 V������������DsP2��407֮ǰ��Ҫ�M���ƽ�D�Q����O��5V�D�Q��O��3��3 V����ϵ�y����LV��45��
3��2 27 Vһ·�������·
�ͺτ�ź㉺ͬ���l늙C�l��36 V����늣�ͨ�^ȫ�������ɮa��50 Vֱ��늣�Ȼ����BucK�·�ز���������D3��ʾ������̖s��7ݔ��PwM����̖�����ƹ��ʹ�Q5�Č�ͨ�c�P�࣬ͨ�^�{��PwM����ռ�ձȿ��ƹ��ʹܵČ�ͨ�r�g���Ķ��_��ݔ��늉���27V��Ŀ�ġ�
�D3��D10��R22��C15�����˾��_���o�·�����ڹ��ʹ����_ͨ�r���a���_��������P���r���a���_��늉����@Щ����Ӱ푹��ʹܵ������������s�̹��ʹ܉������ڱ�ϵ�y�й��ʹܵ��P�����a���ě_��늉���Ӱ��·������������Ҫԭ����˱��·ϵ�y�������ʵĽ����ز��·�еĹ��ʹܶ�����ᘌ��_�P���P���r�ľ��_���o�·����Q5�P���r��ؓ�d��������O��D10�o��ݳ�늣�Q5��늘O�����u�pС��������c15�ɶ�늉�����ͻ׃��Q5��늘O�c�l��O�ɶ�늉�������dv/dt�����ƣ����Խ��dv/dtԽС����dv/dt=Im/c��ʽ��Im��ؓ�d****�����Q5��늘O늉������늉����ƣ����@�N��r�£��������F��늘O늉��ͼ�늘O���ͬ�r�_��****����r������������F****��˲�r��幦�ġ��ڈD3�У�D11��L2��C16��C17���������m���·��ݔ������ڹ��ʹܵ����������}�ӵģ�ݔ�������늸С���ݺͶ��O�ܵ����������B�m�ġ�ƽ���ġ�
3.3��13 Vһ·�������·
��D4��ʾ����13 Vһ·�������·���Կ�������һ���BucK�·ͨ�^׃�νM�϶��@�õģ�Q6��Q7��Q8��Q9�քe�c������늸С�����Լ����o�·�������Ă��ز������������܌��Fͬ27 Vһ·�������·������LA-28NP��LV-28P�քe�����������늉���������
���·��R29��R30����։���裬��ֵ��ȣ����Ԍ�50 V(Dc)�ֳɃɂ�25 V��Ȼ��քeͨ�^���ɂ��ز����ز�������13 v��
��������Mһ��������13 V��늉����������о��{�㼼�g��ͨ�^늉�������Lv-28t����d��B���c늉����M�вɘӣ���A�c늉�����B�c�r���f��+13 Vһ·늉�ֵ��****ֵ����-13 vһ·늉�ֵ��****ֵ���˕r�ͽoQ8ݔ��PwM��������̖�M�Дز�����ֱ�����c늉�����㡣ͬ�ӣ���B�c늉�����A�c�r��̎��������ơ�
3.4 H�����·
�������ĺ���˼����늉�����ݔ�����������Ҫ��ס�l늙C�C��늉�����˄�ſ��Ʋ��ֺ���Ҫ���D5��H�����·�����z�y���l늙Cݔ��늉������~��ֵ�r����ͨ�^DsP����Q1��Q3�Č�ͨ�M�������ţ���ݔ��늉������~��ֵ�r��ʹQ2��Q4��ͨ�M�з����ţ��Ķ��_������늉���Ŀ�ġ�
3��5 A��D�D�Q�·
���ڡ�13 Vһ·���о��{���·�е�늉��ɘ�ֵ�п��ܞ�����Ҳ�п��ܞ�ؓ����DsP2407���Ԏ���AD�D�Q����ģ�Mݔ������0��3��3 v����˵����xһ��ģ���D�QоƬ��AD7862������AD��˾�Ƴ���һ�N�����ܡ����ġ���+5 v�Դ�������p12λ4ͨ���p·ͬ�r�ɘ��D�Q����ģ���D�Q����AD7862-10оƬ��ģ�Mݔ�뷶����һ10��10 v������ڱ�ϵ�y���x��ԓоƬ����13 vһ·���о��{���·�е�늉��ɘ�ֵ�M��ģ���D�Q��
AD7862�ڱ�����ϵ�y�еĽӾ���ʽ��D6��ʾ�����ڱ�ϵ�yֻ����AI)7862��8������������DBll��AD7862��****��̖λ��Ҳ�������Д�ɘ�늉�����̖ؓλ����ˌ��������е�DB7�ӵ�AD7862��****λ����λDBll�ϡ�AD7862��Ƭ�x�˽���DsP��IOPK���_��ͨ�^DSF��ݔ��O��1�Ķ�����AD7862���xͨ�c��ģ���D�Q��̖(8�_)�ɽ���DSP��IOPcO���_���ƣ�AD7862�ڱ�ϵ�y��ֻ���ڌ���13 Vһ·�о��{���·�е�늉���
���M��ģ���D�Q����ֻ��һ��ģ�Mݔ����(svM)��ͨ�^��Ao�����x��A�Mͨ·���ĈD6���Կ���������A��D�D�Q��һ���x��̖�xȡAvl���ڶ����x��̖�xȡAv2������ڱ�ϵ�y�Ќ�A�M��·��̖ݔ��˽���һ�𣬵ڶ����x��̖�xȡ����Ȼ��svM��̖��
3��6����Ӳ���·
DsP2407�a����PwM�����^�����o��̖һ��߉�C���·(GAl20V8)�M��߉�C�����뷴��Ŵ������ٽ��^�������·��քe����IR2130��IR2118��[R2110��оƬ�M�Є������{����ݔ��늉��{���͡�13 vһ·�о��{����ơ����⣬�������ϵ�y�ɿ��ԣ�ԓ�·�OӋ���^�����o�·��
�·��߀���ù�늸��x�ȼ��g���ڿ����·�c������֮�g���ù���������TLP558оƬ�M�ɸ��x�·�����m���Ӵ������ʼ��ӵؾ�·�IJ������ȣ������ϵ�y��늴ż����ԺͿ��ɔ_��������߹����ķ����ԡ�
��֮��Ӳ�������OӋ����ּ�ǣ������OӋӲ���·�����F�l늙C�C��늉�����ݔ���Լ��M���ܵ���������·�Ŀ�늴Ÿɔ_��������
4������ܛ���OӋ
ϵ�y�п����΄յČ��F�ǿ�����ܛ������ɵģ�����ܛ�����OӋ��ֱ�ӛQ������ϵ�y�Ŀ������ܡ�DsP2407ܛ�������Z��ͨ����c�Z�ԺͅR���Z�ԣ���ϵ�y����ֱ������Ӳ���ąR���Z�ԣ�����@�N�ͼ��Z����ֱ�ӌ�Ӳ���������Z�ԣ�ÿһ�l�R���Z�䌦��һ����Ӳ�����������x���_���{ԇ�rʮ�ַ��㣬����ÿ�l�R���Z�䶼�й̶��ęC�����ڣ����ʹ�ÅR���Z���܌��r�g�M�о��_�Ŀ��ơ�
��ϵ�y�Ŀ���ܛ����Ҫ�֞�ϵ�y��������ģ�K���Ϲ���ģ�K�ɴ����������ģ�K���Է֞����ׂ�ģ�K��
(1)��ſ���ģ�K��
(2)27 v(Dc)һ·�������·�ز�����ģ�K��
(3)��13 V(Dc)�������·�ز�����ģ�K��
(4)�о��{���·�ز�ģ�K��
���Ϲ���ģ�K�ɷ֞����ׂ�ģ�K��
(a)��ſ����·���F�^����r��
(b)27 V(Dc)�������·���F�^����r��
(c)��13 V(Dc)�������·���F�^����r��
�D7�����������̈D��������Ȟ�ϵ�y�������������҂Ȟ����ģ�K�a��������̖��ϵ�y�M�й�
��̎���ij���ϵ�y�ڳ�ʼ���������Ҫ��ȫ���������늉��ɘ�ֵ�Д��Ƿ���Ҫ��ֱ��������������Ҫ�tҪ�Д��Ǽ�����ֱ��������߀�Ǽӷ���ֱ����������H��Ҫ���_ͨ�Է�ס�ͺτ��ͬ���l늙C��ݔ����늉����ڶ�������ֱ��27V��늉��ɘ�ֵ����DsP���M��PID�����㷨�\�㣬�������ռ�ձȵĔ�ֵ���������ļĴ������Կ���27 Vһ·��PwM�����Ķ����Fֱ��27 Vһ·��늉���������ݔ��������������ֱ��һ13 V��늉��ɘ�ֵ����DsP���M��PID�����㷨�\�㣬�����ռ�ձȵĔ�ֵ���������ļĴ������Կ���-13Vһ·��PwM�������IJ�����ֱ��+13 V��늉��ɘ�ֵ����DsP���M��PID�����㷨�\�㣬�������ռ�ձȵĔ�ֵ���������ļĴ������Կ���+13 Vһ·��PWM�������岽�������о�늉��ɘ�ֵ�Д��Ƿ���Ҫ�_���о��{���·������Ҫ�tҪ�Д����Ϲ܌�ͨ߀���¹܌�ͨ���_�P���_ͨ��С�������о��вɵõ�늉�ֵ��AD7862��ģ�D�Q������D��sP���M��PID�\��̎���������ֵ����С��������M��ѭ�h�w��
��ϵ�y���κ�һ·���F�^����r�r���ɾC��߉�����·�������Ĺ��Ͼ�·���з��i��������������ɹ��Ϲ����ӳ����Ͼ�·���F�Ի֏�̎��������Ӱ�������������·�Ĺ�����
5�yԇ�Y��
��1���ڿ��d�ͼӲ�ͬؓ�d�r���yԇ�ĽY�����S��ؓ�d��׃����늉�����������27 V������ϵ�y������ָ�ˡ�
����������һ���߾��ȡ��ߌ��r�ԵĿ�������ʹ�ͺτ�ź㉺ͬ���l늙C���нӽ�ˮƽ�������ԣ�늉�������늉��{����С�ڰٷ�֮3�����Ԟ�ؓ�d�ṩ���������õ������
|