���D��Сؓ�d�oˢֱ��늄әC���ٿ���
��ʿ���������S�Σ����W��
(�Ї��ƌWԺ�Ϻ����g�����о������Ϻ�200083)
ժҪ�������oˢֱ��늄әC�Ĺ���ԭ����ᘌ��A�F����ʽ�t���ƽ�x��늙C�D�ٷ����Ե�����Ҫ������늙C�D�ٵĔ��Wģ�ͣ���늙C��ϵ�y���h���M���OӋ��ͨ�^�о�������������͜yԇ���ó�늙C****���Ʒ��������F��늙C�D�ٵĸ߷����ԣ����l���ˑB�y���c���Ƶĸ߾����ṩ�˼��g���C��
�P�I�~���oˢֱ��늄әC���i��h���t���ƽ�x
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2008)06��0048��03
0����
�oˢֱ��늄әC�Ⱦ��н���늄әC�ĽY�����Ρ��\�пɿ����S�o�����һϵ�Ѓ��c���־߂�ֱ��늄әC���\��Ч�ʸߡ��o��œp�ļ��{�����ܺõ��T�����c���䑪���ѱ鼰�������g�I��
�A�F����ʽ�t���ƽ�x��������Ҫ���l���ˑB�ǵĜy�����ȁ�˶���Ӱ푼t���ƽ�x�y�����ȵ����غܶ࣬늙C�D�ٵķ����Ԍ��ڼt���ƽ�x�ˑB�y�����ȁ��f�O����Ҫ�����]�����D�١�Сؓ�d���D��ƽ���������`������ԣ��A�F����ʽ�t��غ��x��һ��ʹ�ßoˢֱ��늄әC����ؓ�d�әC����
�������D�ٞ�1 r��s��ؓ�d�s70 g���D�ӑT���s250 g��cm��늙C��������������D��Сؓ�d�����c�����䷀�ٿ����M���о���
1늙C�D�ٔ��Wģ�͵Ľ���
�oˢֱ��늄әC�����ɶ��Ӻ��D�ӽM�ɵ�늙C���w���⣬߀Ҫ����λ�Â������������·�Լ�����߉�_�P��ͬ���ɵēQ���b�á��oˢֱ��늄әCͨ늺���λ�Â���������̖�����£������D�ӵ�λ�ö����@�M�����Q�����a��һ�����Mʽ�����D�ň�����ԓ���D�ň��������£������D�Ӿ��B�m��������D������
���������о���Ŀ��늙C��늙C�@�M�����࣬������ͨ늠�B�������@�M�������ӡ�늙C�D��ϵ��KT=2 N��m��A��늄ӄ�ϵ��Ke��=100 V��s��rad��늙C�r�g����Te=0.1 s��늙C����R=155����
�oˢֱ��늄әCϵ�y�Y���D��D1��ʾ��
ʽ�У�n(S)��늙C�D��(r��s)��U(S)���Դ늉�(V)��T1(S)��늙Cؓ�d���D��(N��m)��Te��늙C�r�g����(s)��K��늄ӄ�ϵ��(V��s��tad)��KT���D��ϵ��(N��m��A)��R��늙C����(��)��
������֪��늙C��������ʽ(1)�ɵã�
2��ϵ�y�OӋ
2��1늙C��ϵ�yԭ��
늙C��ϵ�y�����i��h�·��늙C�M���l�ʺ���λ�i����������̖�ɰ��b��늙C�D�ӺͶ����ϵĹ�ž��a���·�o����늙C��Ŵa�Pһ����4096�̾����a��6�̾��ִa��늙Cÿ�D��һ�ܣ���ž��a�·ݔ��4 096���r��}�_��6���r��}�_��·��̖��
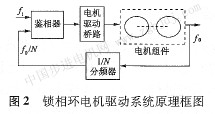
늙C��ϵ�y����Ҫ�h�����b������늙C�Ә�·��늙C�M���M�ɡ�늙C�M������늙C����ž��a�����������i��h������ʎ�������á������OӋ���i��h늙C��ϵ�yԭ����D2��ʾ��
2��2���l���OӋ
����늙C��ž��a���·���OӋ��늙C1 r��s���D���ٶȿ�֪����ݔ�����l��̖�l�ʞ�4 096 Hz�����]��늙C늸м��Cеϵ�y�T���Ĵ��ڡ�푑��r�g������ؓ�d�D�ص�Ӱ푣����ֱ����4 096 Hz�����b�����ķ�����̖��늙C푑���Ȼ��������ݔ����4 096 Hz�l�ʵĸ��l׃���������l�ʽ��͵�һ���̶Ⱥ�늙C�D���֕�׃�ò�����������б�Ҫ��늙Cݔ���l���M��һ���ķ��l֮����ݔ�뵽�b����������늙C�D�ӵ��ٶȷ�����̖��
���D2��ʾ�Ćέh늙C�i��h����ϵ�y���������������c�h·���Pϵ��늙C****�i����D��nmin��
ʽ�У�nmin��****�i����D��(r��s)��Nmin����С���lϵ�������Ŵ�����늙C������[rad��(s��V)]��Vs��늙C�@�Mͨ�****늉�(V)��m�龎�a���̾�����
��ʽ(3)�ɵã�
���������о���Ŀ��늙C��nmin=1 r��s��Vs=24 V��K=4 rad��(s.V)��m=4 096��Te=O 1 s����Ӌ�����С���lϵ��Nmin��
���]�����l����һ����2���ף������늙C�D�ӵ�ƽ���Լ�늙C��푑��ٶȣ���ȡNmin��16���t늙C�D�ٷ�����̖4 096 Hz�}�_��16���l��õ�256 Hz�}�_��̖�������i��h�ķ�����̖�����i��h�Ę˜ʕr���̖���ɴ˴_����256 Hz���ɾ��w��ʎ�·�a���������OӋ�·�x�õķ��l����12λ���M�ƴ���Ӌ����CD4040���i��h��cD4046��
2��3늙C�Ә�·���OӋ
늙C�@�M�Q���OӋ���Â��y�Ę�ʽ�·���g�a�·����ʽ������۷քe��P�ϵ���N�ϵ�MOs��Ч���ܡ�늙C�Ә�·�·ԭ��D��D3��ʾ��
�D3�У�H1��H2��H3��늙C��Ŵa�P�ִa�a������̖���l�ʞ�6 Hz����λ��120����ENABLE���i��hݔ����̖������3��8�g�a����ʹ�ܶ˿�����̖��
����늙C�Ә�·�·ԭ���ɵ�늙C�@�M�Q��������1��ʾ��
2��4늙C��Ȧ�@�M�V���·���OӋ
늙C�ړQ���r�������@�M�ϵ�늉����lͨ�࣬��˕��a������}�_�ɔ_���@�N�ɔ_���^���֕�Ӱ�늙C�D�ӵ�ƽ���ԡ����˞V���ɔ_����늙C�@�M�ăɶ��OӋ�V���·��ͨ�^���V���·�ą����M�Ѓ������_��늙C�D�ٷ����Ե�****����늙C�@�M�V���·ԭ����D4��ʾ��  ͨ�^ܛ�����棬�V���·����Gf��׃��������һ�M�@�MMA�Ϲ���늉���Ӱ푣���D5��ʾ��
���������ͷ����֪���@�MMB��Mc��늉������cMA�@�M��ͬ��ͨ�^��ܛ������͌��y�Y���M�оC�Ϸ������V���·���CfȡֵO��47��F�r��늙C�����@�M��늉��ܸɔ_��С��늙C�D����ƽ����
3ԇ�Y������
�oˢֱ��늄әC��ϵ�y�OӋ���F��ͨ�^��ʾ�����yԇ늙C��ž��a�·ݔ����̖���ڵķ������Ԍ�늙C�D�ٷ������M���u�r��
��늙Cһ���Ͼ����xȡ16���̶��c����ʾ�����yԇ늙C��ž��a�·��ԓ�cݔ���ļ��a�}�_����̖���ڣ�ÿ���yԇ�c�yԇ�r�g��10 min���քeӛ䛸��yԇ�c�}�_���ڵ�****ֵ����Сֵ������****ֵ����СֵӋ���ԓ�c��늙C�����ȡ��oˢֱ��늄әC���yԇ�c���a�}�_����****ֵ����Сֵ��������������D6��ʾ��
늙C��ž��a�·��ݔ����̖��Փ�����ڞ�244��140 625��s��ͨ�^�yԇ��Ӌ�㣬늙C�D�ٵķ���
��****ֵ��6.627/1000���������_����10-3����ȫ�M�㺽��aƷ���OӋ��ʹ��Ҫ��
4�Y�Z
���Č������õ��D��Сؓ�d�oˢֱ��늄әC��ϵ�y�M�����о��������i��h���g���oˢֱ��늄әC����ϵ�y�M�����OӋ�����F��늙C�����D�ӕr�ĸ�ƽ���ԣ��yԇ�Y������늙C��ϵ�y�OӋ�������С����ڟoˢֱ��늄әC��ϵ�y�Dz����ٶ���̖�����Ćέhϵ�y����ˣ��������늙C��ϵ�y������늙Cλ�÷������γɃȭh����h���p�h�����������Mһ�����늙C���D�ٷ����ȡ�
|