���ڙC��ҕ�X�ĺ꣯�p���c����ϵ�y���о�
Ф�I��1����־��2������3��������2
(1���Ϸʹ��I��W�����պϷ�230009��2���ִ�W�������L��130025��3������܇�ɷ�����˾���������430000)
ժҪ��ᘌ�Ŀǰ��һ���ӷ�ʽ���治�ܝM��Խ��Խ���������Ҫ����������ò��M늄әC�͉�������M�ɺ꣯�p�ӵ�����ƽ�_�����M늄әC���F���г��ƄӺͶ�λ����������M�и߾��ȶ�λ�`���a����ͬ�r���˽�Q�꣯�p�Ӄɲ��ֵąf�{���Ɔ��}�����������ȫ�֙C��ҕ�X�ąf�{���Ʒ�������ĩ�ˈ������cĿ���c�ľ��x��������ֵ�������ǰ���x�����O���Ŀ����}ֵ���t���Ӻ���_�M���Ӷ�λ����t���Ӊ�������M�ж�λ�`���a����ԇ�Y��������ϵ�y�Ķ�λ�ٶȿ죬��λ���Ȟ�1 ��m��������λ�r�gС��40 ms��
�P�I�~������_�����_����������������}ֵ���D��̎��
�ЈD���̖��TM38��TM383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)06��0026��04
0����
�S��Խ��Խ�������ϵ�y��܊�¹��̡���ͨӍ���̡����﹤�̡����ܙCе���̡����ܹ�W���̵��I���еijɹ����ã������أ��@Щ�I�������õ�����ϵ�yҲ����˸��ߵ�Ҫ���e��������ϵ�y���\�Ӿ��ȡ�푑��ٶȡ������X���ɿ��ԡ��`���Եȷ����Ҫ��Խ��Խ�ߡ�һЩ�����I��Ҫ������ϵ�y�ڴ��\�ӵ���r�£�ͬ�r���F�{�����\�Ӿ��ȣ�Ҳ��һЩ�����ĿҪ������ϵ�y�ڿ����\�ӵ�ͬ�r�����о��_�������X�ȣ��@ЩҪ��ʹ�Â��y�IJ��Æ�һ�ӷ�ʽ������ϵ�yԽ��Խ�y�Ԅ��Ρ�
ᘌ�������r����20���o80������к��ڣ�������W�����^����˺꣯�p������ϵ�y�ij����뷨�����^��20���̽������Փ�Ǐ���ՓՓ�C߀�ǏČ��H���õ���r�����C���˺꣯�p������ϵ�y�ںܶ������܃��ڂ��y�IJ��Æ�һ�ӷ�ʽ������ϵ�y[1]���꣯�p������ϵ�y���늙C�ɴ��г��\�Ӻ͉���մ�푑��졢λ�Ʒֱ��ʸߵȃ��c����Ӳ������ϵ�y���г̵�����λ��Ȼ���ɰ��b�ں�Ӳ����ϵĉ���մ������Ը��l푄ӑB�a��ϵ�y�Ķ�λ�`��Ɍ��F���ķֱ��ʺͶ�λ���ȣ��c���y�o�B�a����ȿs����ϵ�y�ķ�����λ�r�g������˶�λ���ȡ�
������������ò��M늄әC�͉�������քe��������ƽ�_�ĺ����c�Ӳ��֣�����_�Ե���酢������F�����ƄӶ�λ�����_�����ں���_���Ժ���_�酢������Fĩ�˸߾��ȶ�λ�`���a����ͬ�r���˷քe�f�{����_�����_��������ɸ߾��ȶ�λ����������ÙC��ҕ�X�еĈD��ƥ���M��ĩ�ˈ������Ͷ�λĿ���c���R�e��������֮�g�ľ��x��������ֵ�Ŀ��Ʒ�����ʹ����_�����_��ͬ����ض����΄ա�
1��Ӳ��ֵ��OӋ
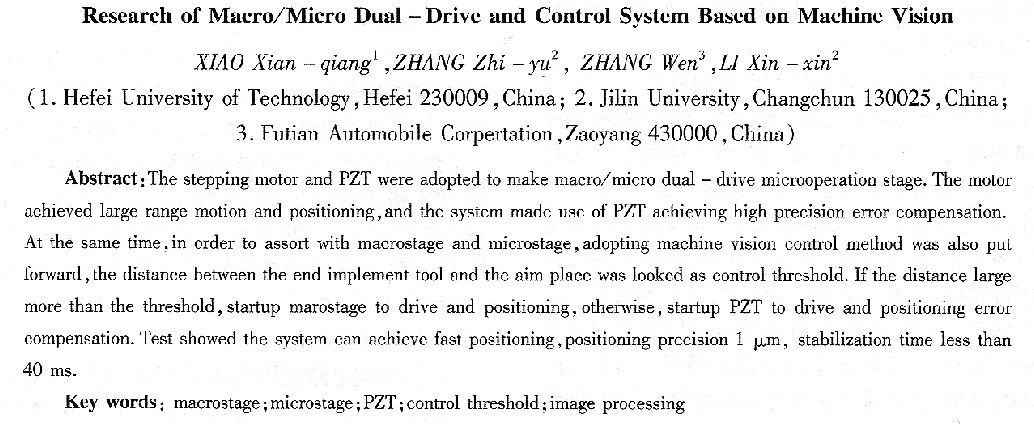
���M늄әC��һ�Nݔ���cݔ�딵���}�_��������������Ԫ�������п�����ͣ�����_���M����ֱ�ӽ��Ք����������c���ѽ��V�������ڸ����I��[2]�������OӋ�ĺ���_�ɾ���ֱ����܉�;��ܽz�ܽM�ɣ��ɲ��M늄әC�M���ӡ���XYZ���������ϣ�ÿ����������һ��늙C��һ���z�܌�܉�C���M�ɵ��ӈ���ϵ�y���քe���F����y��z�����N�\�ӡ��@�N������ʽ�����c�ǽY���o���������^���m�ù����г��^�������Ҫ����D1��ʾ��늙C�ӵĽz�ܙCеϵ�yÿ���Ƅӵľ��x��330 Ixm���x�õľ��ܽz�܌��̞�40 mm���`���lO��m���zĸ�S�S����С�ƄӲ�����0��33 ��m[3]��
(1)����_���ж����ɶȡ����\�ӷ����ĺ�ӹ����_��
(2)���_���ж����ɶȡ�С�\�ӷ����ĸ߾��ȵ��ӹ����_��
(3)�C��ҕ�Xϵ�y���ЈD��̎�����Oҕ���ֱ����^�ߵęC��ҕ�Xϵ�y�����������ߵ��ˑB��λ�õȾ��_��λ��������ҕ�X��ۙ���������C�����^��ʼ�K��ҕҰ�У��Ķ����F����ʽ������
(4)����_�\���Կ�������Ҫ���ƺ���_��ƽ�ƺ����D�\�ӣ�
(5)���_�\�ӿ�������Ҫ�������_��ƽ�ƣ�
(6)����Ӌ��C��Ҫ�Á�������λ�C�Ͳ����^�̵ıOҕ�c�˙C�������档
���ˌ��F���ֻ�����늙C��ÿ�������ϵ��\�У���Ӳ��ֵ�늙C������\�ӿ��������\�ӿ�����ģ�K����Ҫ�����Ѓɂ����ٸ߾��Ȳ��M늄әC���\�ӿ��ƣ����ṩ���I�˜ʵ�RSһ232�������нӿڣ��Ԍ��F�cӋ��C��ͨ�š�
�ӿ������OӋ�����S�\�ӿ��ƣ�����һ������������һ����Ƭ�C�քe�����������M늄әC����Ƭ�C������λ�C��Ӌ��C������λ�C��ͨ�^RSһ232����ͨ�š�Ӌ��C�c��Ƭ�Cͨ��ԭ��D��D2��ʾ��
��ϵ�y���ӿ�����������c8051F��Ƭ�C�������˂��y�ľ�·���s���ɱ��ߵIJ��M�����������H�����˾�·�������˳ɱ������ҿɿ��Դ����ߣ����ܸ���ϵ�y��Ҫ�`���׃���M늄әC���Ʒ�����
2�Ӳ��ֵ��OӋ
��늲�������һ�N���Љ��Ч���ď����w��������մ������a����׃�r�����������F�c�����ɱ�����늺ɣ��@һ�F��Q�鉺�Ч������֮�����ډ���մ��ϼ�һ늈��r������մɕ��a����׃�͑������@�N��늈��a����׃�����ĬF��Q���扺�Ч�����䑪׃s��Ļ������扺늷���[4]��
ʽ�У�E��늈����ȣ�d�鉺�ϵ����
���ډ�늲����ڽo���ṩһ����늉��r�܉�a���������ס��{��������λ�ƻ��\�ӣ�ͬ�r������Ӿ��о��Ժá����Ʒ��㡢λ�Ʒֱ��ʸߡ��l��푑��á����l�ᡢ�o�Ÿɔ_���o���ȃ��c�����҉�������܉F�w�eС�������p�������ܶȵ����c������Ӳ��ֲ��É����������ֱ���Ӳ���[5]��
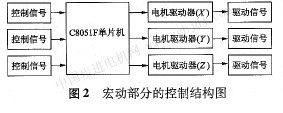
��ϵ�y���õĉ�늾������������ʽ����ֱ������(���º��Q����)�������\��ԭ��ģ������Ȼ���ijЩ���Є���ķ�������D3��ʾ����һ��ƽ�в���܉���ȣ�������һ�����Mʽֱ����
�C��(���º��Q�әC��)���әC���������֘��ɣ�������λ�ĉ�늯B��A������ֱ���ӵĉ�늯B��B��������λ�ĉ�늯B��c�������ֳ�һ�����������β��ã����B�ӳ�һ�����w�����Љ���մ�A��c������λ��B�����ṩλ�ơ����r�����늉����b�ÿ���������µ��\���^��[6]��
��1������늯B��A������L��픾o܉�����γ���λ��
��2������늯B��B������L��
��3������늯B��c������L��픾o܉�����γ���λ��
��4������늯B��Aʧ늣�d�c܉�����_��
��5������늯B��Bʧ늣�B�տs����늯B��cʧ늣�c�c܉�����_�����ˣ��әC������ǰ�M��һ�����L��
ѭ�h1��5�����әC���ɲ��������\��(���M)�������׃�r�������̖���t���b�ÿɌ��F�����\�ӡ�
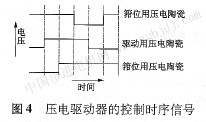
�IJ��Mʽ�Ĺ���ԭ�����Կ���������늯B�ѵĿ�����̖���Еr���ģ��������\�Ӟ��������������ĵĹ�����ʽ������̖������D4��ʾ����̖�鷽����������ɾ��w�l���Q����һ����f���ڼӹ������^�ߕr��A��c��늉�������ͬ���ډ�늯B�ѿ��Գ��ܵķ����ȣ��M���ܵ������늉���ֵ���@���������γ���λ����B��늉����Ȅt����Ҫ���L�ľ��x
�Q�������������ĉ�������IJ��L���Ȟ�O��1��m���Ƅ��ٶȞ�2��5 mm��min��
3ҕ�X����ϵ�y�OӋ
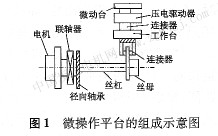
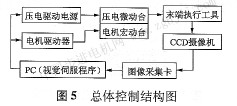
���˅f�{���ƺ꣯�p��ϵ�y�ĺ�ӿ��Ʋ��ֺ��ӿ��Ʋ��֣����IJ���ҕ�X�ŷ�ȫ�ֿ��Ƽ��g�����ĵ��p���ӿ���ϵ�y�Y���OӋ��D5��ʾ������ϵ�y�����������������ĺ�Ӻ��Ӄɲ��ֵĿ���ϵ�y�����к��ϵ�y�ɲ��M늄әC��늙C�����Լ���Ƭ�C�M�ɣ���ϵ�y�ɉ���մ����Դ�����P�����D�QоƬ�M�ɡ�
���û���ȫ�֙C��ҕ�X�ŷ��ĺ꣯�yһ���Ʋ��ԣ����Ʋ������£����\��ҕ�X�ŷ����Ƴ��������Ӌ��C����ͨ�^�����\�ӹ�Ӌ�͈D��ƥ���ģʽ�R�e����ӑB��ۙ���R�e�����_�ϵĈ��й��ߺͲ���Ŀ�˵�����λ�þ��x�Pϵ�����Ҍ����_�ϵĈ��й��ߺ�Ŀ��λ�õľ��x��������ֵ���������֮�g�ľ��x�����ֵ�r��ͨ�^����Rsһ232����ͨ����늙C���c����ϵ�y�l�������Ŀ�����̖�����Ӻ���_�����������ϵ�늙C����t���Ӊ�����_��Ҳͬ��ͨ�^����Rs-232����ͨ������մ������Դ�����P�����D�QоƬ�M�ɵĉ���ӿ������l�������Ŀ�����̖�����Ӊ�����_E���������ϵĉ��������
ϵ�y���û���ccD��ģʽ�R�e�����ȫ��ҕ�X�ŷ�����ϵ�y�ӑB�ظ�ۙ���R�e���b�����_�ϵĈ��й��ߵ�λ�ã�����λ�ú͈��й���Ҫ��K��λ��λ���M�б��^���Ҍ�ҕ�Xϵ�y�R�e���Д���Ĉ��й��ߺ���KҪ��λ��λ�����鷴��������̖�����������ӿ��Ʋ��֡����ܶ�λ�C����Ӳ����M�д����Ƅӣ��ɉ���������_�M�п��پ��ܶ�λ�̈́ӑBλ���a����ȫ��ҕ�X�ŷ�ؓ؟�������_�Ŀ��ƅf�{��
ᘌ�Ŀǰ�D��ƥ���㷨�ձ�����\�������M��������ҕ�X�ŷ����Ƽ��g���õĆ��}�����ĸ����^���������ϵ��\�ӿ��g�������^С�����\��·������ͨ�^�����A�y�������c�����M�л��ڈD��ƥ���Ŀ�˸�ۙ���R�e��ҕ�X�ŷ����ƕr�������M��ȫ�ֵ�����ƥ���R�e������ֻ��ϵ�y��һ��Ŀ��ƥ���R�e�r���M��ȫ�������R�e��Ŀ�˵ij�ʼλ�ã��Ժ�ÿ��ƥ���R�e�ĕr�����ϴ��R�e��λ�������ʼλ�ã����������R�e���Д��Ŀ��Ŀǰλ�ú�ϵ�yָ���Ƅӵ�λ�õ��Pϵ���Д��Ŀ��Ҫ�Ƅӵķ���;��x��Ȼ�����������һ���R�e���ڃȵ��ƄӾ��x�����@����ʼλ��ƫ��һ�����x�����ȵ�һ��С�^����M��ƥ�������R�e���@��ʹ���\�������pС���ӿ����R�e�ٶȣ����F�ˌ��r�Եĸ�ۙ�R�e[7]��
�\�ӹ�Ӌһֱ������ҕ�l���s�Լ�ҕ�l��̖��̎�������ǜp��ҕ�l̎�����\��������Ч����֮һ������ᘌ�Ŀǰ���������I���gС��܉�E�ɹ�Ӌ�����c�����\�ӹ�Ӌ��˼�����뵽���ڈD��ƥ���ҕ�X�����㷨�Ё������������е�ĩ�ˈ������ĸ�ۙ���R�e��λ������˽��������\�ӹ�Ӌ�ĈD��ƥ�䷽���M���\�әz�y�c��ۙ�������\�ӹ�Ӌ�ĈD��ƥ��̎���ļ��O�l���ǣ����D���ҕ�l�е�Ŀ�˷ֳ��S��С�K�����@ЩС�K��ȫ����Ŀ�˻��߱�������
�˷N���O���ԙz�y����_��Ŀ��[8]��
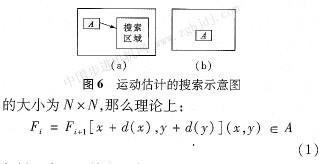
���O���\�ӱ������M��Ŀ�˙z�y�c��ۙ�r�����D�����ҕ�l�к���Ŀ����ĸA�ĉK����λ����D6a��ʾ�����^�\�Ӻ�����һ��ҕ�l���@������Ŀ����ĸA�ĉK���F�ڈD6b��ʾ������λ�ã��OA
�������ͨ�^ǰ�γ����\�Ы@�õ���Ϣ�܉��Д������Ŀ����ĸA�K����һ���r�̵��\��܉�E�����M����һ�εĸ�ۙ�c�R�e��λ�ĕr��͛]�б�Ҫ�M��ȫ�ֵ�ƥ�����������Ǹ���ǰ���Д����܉�E��һ����С�ķ������M��ƥ���R�e�Ϳ����ˣ��@�Ӵ�������ƥ���R�e���ٶȡ�
��D7��ʾ�����Oijһ�r��ҕ�X���Ƴ����R�e��������ĸA�ĉK��(i��j)̎����������ĸA�ĉKָ
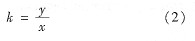
���Ķ�λĿ���c(x��y)����ô�K�������\��܉�E���Դ˕r�K��λ�Þ�����ԭ�c��Ŀ��λ���B������ֱ����б��k��ֱ�����̞����ͨ�^ʽ(2)Ӌ�����
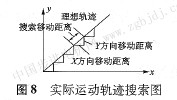
��ʽӋ��ֻ��������\��܉�E�����H��ĩ�ˈ����������������_���\�Ӳ��������@�l�����܉�E���\�ӡ����ڌ��H�\���У�������һ���R�e����t�ȣ��քe��x�S��y�S�����\�ӣ��Ұ��@�l�����\��܉�E��ֱ��б��^�ı��������\�ӡ�늾����f��һ���R�e����t�ȣ����x�����\��d���x���t��y���������\�������x�����^һ���R�e���ڵ��\�Ӻ�����ĸA�ĉK�ֻص������܉�E���ˡ��m���H�п�������ƫ������^ҕ�X�����㷨���`���{�⣬��
���Ͽ��������@�l����܉�E�酢�����M���\�ӣ���D8��ʾ��
���ô��OӋ˼·�����M����һ�ε�ƥ���R�e������ĸA�ĕr��ֻҪ���@��������ĸA�ĉK�ϴεij�ʼλ���������@�l����܉�E���Ƅ�һ�����xs��s����ͨ�^ʽ(3)Ӌ�㣬�ұȺ�����ĸA�K����һ�c�ķ����M������ƥ�京����ĸA�K�Ϳ����ˣ����p���ˈD��ƥ���R�e�\������
4ԇ�
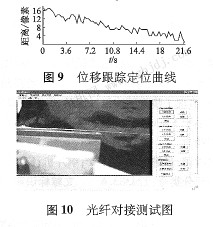
�yԇϵ�y���岿�ֽM�ɣ����r�Oҕ���\��ҕ�X�ŷ������Ӌ��C��Rs-232����ͨ�ž����@�R��ccD�����D��ɼ������߾��Ȳ��M늄әC���z�܌�܉�C����������������մ��ӵ��ӹ����_�������������о��в��õ�늙C�DZ��������r���a�IJ��M늄әC������������ձ�TO��N��˾���a��AE0505D08�͉�늯B���Լ����������ܜy�ع�˾���Ƶ�HPVϵ�Љ���մ��Դ�OӋ�ĉ���������D9�����ú꣯�p�Ӿ��ܶ�λƽ�_�Լ�ҕ�X�ŷ����Ƴ���yԇ��λ�Ƹ�ۙ��λ���������������Կ�����λ�����^���룬��λ�ٶȿ죬�D10�����ñ�ϵ�y�M�й��w���Ӝyԇ�D��
5�Y�Z
����ᘌ������OӋ��һ�N���p�Ӿ��ܶ�λ�C���Ľ�ģ�Լ����Ʒ����M�����о������ø߾��Ȳ��M늙C�͉�������քe���ɺ꣯�p�Ӿ��ܶ�λ�C���ĺ�Ӳ��ֺ��Ӳ��֣�ԓ���ܶ�λ�C��ͬ�r�߂��˲��M늄әC���\���г̴�͉���մ�푑��졢λ�Ʒֱ��ʸߵȃ��c��ͬ�r���꣯�p�Ӿ��ܶ�λ�C���ąf�{���Ɔ��}�M���˷������о������������ҕ�X�ŷ����Ƴ����f�{��Ӻ��Ӹ��Եľֲ����Ɔ��}�����Ҍ����ܶ�λ�C����Ŀǰλ�úͼ���Ҫ��λ��λ��֮�g�ľ��x���������ֵ���ƵIJ��ԣ��M��ȫ�օf�{���ƾ��ܶ�λ�C����λ��ָ����λ�á����������C���ĄӑB���ܺͷ��B���ܾ����ã�ԓ�C���Ĺ����г̞�80 mm��������λ�r�gС��40 ms����λ����100 nm��
|