�o(w��)ˢ�p��늙C(j��)�\(y��n)�����Ե��о�
��?ji��n)?SUP>1,2�����P��1
(1���(y��ng)���I(y��)��W(xu��)���|�����(y��ng)110023��2�|���Ƽ��W(xu��)Ժ���|����Ϫ117022)
ժҪ��ӑՓ��Ԫˢ�p��늙C(j��)�ڿ��d�����d��ؓ(f��)�dͻ׃�N��B(t��i)�µĮ����\(y��n)�����ԣ������M(j��n)һ���о�Ԫˢ�p��늙C(j��)���Ʋ��Ե춨����Փ�ͷ�����A(ch��)��
�P(gu��n)�I�~��Ԫˢ�p��늄�(d��ng)�C(j��)���\(y��n)�����ԣ��������
�ЈD���(l��i)̖(h��o)��TM34 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004-7018(2008)06��0021��03
0�� ��
�o(w��)ˢ�p��늙C(j��)(���º�(ji��n)�QBDFM)����20���o(j��)����Hunt������Լ�(j��)(li��n)�Б�(y��ng)늙C(j��)�Ļ��A(ch��)�ϰl(f��)չ����(l��i)�ģ�����һ�N�Y(ji��)��(g��u)��(ji��n)�Ρ���(ji��n)�̿ɿ�������늙C(j��)�����ڟo(w��)ˢ��r�¼��л\�͡��@���Б�(y��ng)늙C(j��)��늄�(l��)��ͬ��늙C(j��)�Ĺ�ͬ��(y��u)�c(di��n)�����н�������Ҫ׃�l���������������{(di��o)��(ji��)ϵ�y(t��ng)�Ĺ�����(sh��)�����c(di��n)���������ڽ����{(di��o)�ق���(d��ng)ϵ�y(t��ng)��׃�ٺ��l�㉺�l(f��)�ϵ�y(t��ng)��Ŀǰ��(gu��)��(n��i)�⌦(du��)BDFM���о��яČ�(du��)늙C(j��)�Y(ji��)��(g��u)�ĸ��M(j��n)�A�ΰl(f��)չ���������^��(zh��n)�_��(sh��)�õĔ�(sh��)�W(xu��)ģ��[1-3]�Լ��m����BDFM�Ŀ��Ʒ������Ⱥ�����˾W(w��ng)�j(lu��)ģ�͡�d��q�S��(sh��)�W(xu��)ģ�͡�ͬ����(sh��)�W(xu��)ģ���Լ������@���Nģ�͵Ķ�N���Ʒ�����������BDFM��d��q�S��(sh��)�W(xu��)ģ�͞���A(ch��)������MATLAB�ď�(qi��ng)����Ӌ(j��)�㹦�ܺ�sIMu��LINK�Ľ���ʽ���漯�ɭh(hu��n)��������BDf_M�Ġ�B(t��i)���̵�S-Function����(sh��)���о���BDFM�ڮ����\(y��n)�Р�B(t��i)�µĎN���ԡ�
1�o(w��)ˢ�p��늙C(j��)��ԭ������(sh��)�W(xu��)ģ��
1��1�o(w��)ˢ�p��늙C(j��)��ԭ��
BDFM�Ļ����Y(ji��)��(g��u)��һ��(g��)���ӡ�һ��(g��)�D(zhu��n)�Ӻ�һ������·���������b�Ѓ��������@�M��һ�מ鹦���@�M(���@�M)��ֱ�ӽӵ����l�Դ�ϣ���һ�מ�����@�M(���@�M)��ͨ�^(gu��)׃�l���������l�Դ�ϣ���D1��ʾ��ͨ�^(gu��)��׃׃�l����ݔ���Դ�l�ʿ����{(di��o)��(ji��)�D(zhu��n)�٣���(sh��)�F(xi��n)BDFMԪ��(j��)�{(di��o)�١��{(di��o)�ٷ����c�O��(du��)��(sh��)�̓����Դ�ĵ�ݔ���l���ЈD1---�P(gu��n)��BDFM�ķ�(w��n)���D(zhu��n)�ٱ��_(d��)ʽ��[1,5]
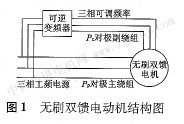 ʽ��fp��pp���քe�鹦���@�M���l�ʺ͘O��(du��)��(sh��)��fe��pc�քe������@�M���l�ʺ͘O��(du��)��(sh��)����+����ʾ�����@�M�c�����@�M�a(ch��n)��ͬ�D(zhu��n)��Ļ����ń�(sh��)����-����ʾ�����@�M�c�����@�M�a(ch��n)�����D(zhu��n)��Ļ����ń�(sh��)����ʽ(1)��֪��ֻҪ׃�l��ݔ���l��һ����늙C(j��)���D(zhu��n)�پ���ȫ�_�����D(zhu��n)�ٿ���׃��ʮ�־��_����(d��ng)fc=0���������@�Mͨ��ֱ�����˕r(sh��)�D(zhu��n)�ٷQ����Ȼͬ���D(zhu��n)�٣���(d��ng)�����@�M��늉���0���������@�M��·��늙C(j��)�\(y��n)���ڮ���늙C(j��)��B(t��i)���ஔ(d��ng)��һ�_(t��i)2(Pp+Pc)�O�Į���늄�(d��ng)�C(j��)����(d��ng)�����@�Mݔ�����ཻ���Դ�r(sh��)��늙C(j��)�\(y��n)�����p���{(di��o)�٠�B(t��i)��feǰȡؓ(f��)�r(sh��)��늙C(j��)�D(zhu��n)�ٷQ�遆��Ȼͬ���D(zhu��n)�٣�fcǰȡ���r(sh��)��늙C(j��)�D(zhu��n)�ٷQ�鳬��Ȼͬ���D(zhu��n)�١�
1��2�o(w��)ˢ�p��늄�(d��ng)�C(j��)�Ĕ�(sh��)�W(xu��)ģ��
���˽���BDFM��ͨ�Ô�(sh��)�W(xu��)ģ�ͣ������¼��O(sh��)��
(1)��·�Ǿ��Եģ���Ӌ(j��)ͣ�
(2)�����F�p�Ͷ����C��Ӱ푣�
(3)��Ӌ(j��)�����@�M�Ϳ����@�M֮�g��ֱ����ϡ�
���������O(sh��)��ǰ���£�����(j��)늙C(j��)��(du��)��·��Փ���Զ��D(zhu��n)�Ӹ���Ȧ�M�����������׃������Ȧ�M�ɶ˵�늉�����ݔ�������õ��o(w��)ˢ�p��늙C(j��)�ľW(w��ng)�j(lu��)�·���̣���?g��u)ĺ㹦��׃�Q�õ������ƌ�(d��o)d��q�S��(sh��)�W(xu��)ģ��ʽ�У�Pp��RpL��Lsp��Lpr�鹦���@�M�ĘO��(du��)��(sh��)����衢�Ըк��c�D(zhu��n)�ӵĻ���;Pc��Rc��Lsc��Lcr������@�M�ĘO��(du��)��(sh��)����衢�Ըк��c�D(zhu��n)�ӵĻ��У�Rr��Lr����r���D(zhu��n)����衢�Ըк�늙C(j��)�ęC(j��)е���ٶȣ�uqp��udp��uqc��udc��uqr��uqp��udp��uqc��udc��uqr��udr������ʾ늉������˲�r(sh��)ֵ����(bi��o)p�鹦���@�M����(bi��o)c������@�M��s�鶨
�ӂ�(c��)��r���D(zhu��n)�ӂ�(c��)��q��d��q��d�S������p��ʾ��(du��)�r(sh��)�g�Č�(d��o)��(sh��)��
ʽ�У�J���D(zhu��n)�әC(j��)е�T����T1��ؓ(f��)�d�D(zhu��n)�ء�
�@�Ӿ���ʽ(2)��ʽ(3)��ʽ(4)��(g��u)����BDFM��d��q�S��(sh��)�W(xu��)ģ�ͣ������^�õ�����BDFM���\(y��n)�Р�B(t��i)�ķ���ͺ�(ji��n)�ε��]�h(hu��n)���ơ�
2�o(w��)ˢ�p��늙C(j��)�ķ���ģ�͵Ę�(g��u)��
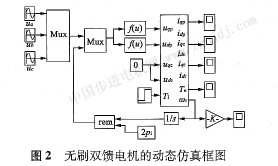
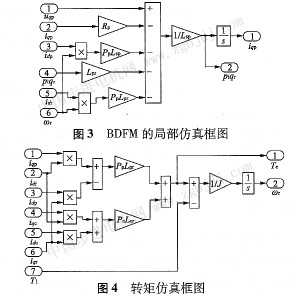
����MATLAB��sIMuLINK�е�s��Function����(sh��)������(j��)ʽ(2)��ʽ(3)��ʽ(4)��(g��u)�ɵ�BDFM��d��q�S��(sh��)�W(xu��)ģ�ͣ����b����(l��i)��BDFM��(d��ng)�B(t��i)����ģ����D2��ʾ��
�D3��ʽ(2)�е�һ��(g��)늉����̵�MATllAB��sIMULINK s-Function����(sh��)���b�Ą�(d��ng)�B(t��i)����ģ�͡��D4����MATLAB��SIMINK s��Function����(sh��)���b��늴��D(zhu��n)�ط��̺͙C(j��)е�\(y��n)��(d��ng)���̵Ą�(d��ng)�B(t��i)����ģ�͡���׃�Q��ꇣ��Ķ��õ�BDFM��d��g�S��(sh��)�W(xu��)ģ��[4-6]��
3 BDFM�\(y��n)�����Ե��о�
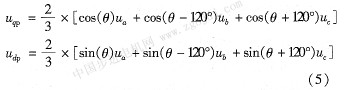
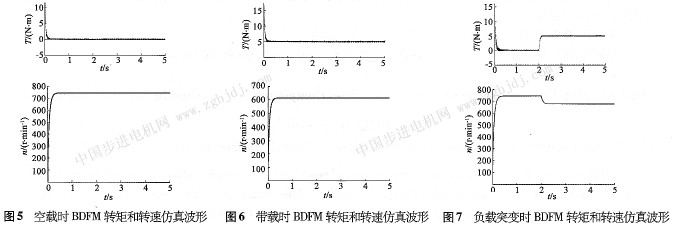
���IJ��ÈD2��BDtrM��(d��ng)�B(t��i)����ģ�ͣ��ڹ����@�Mʩ���Դ늉��������@�Mֱ�Ӷ�·��r�£����o(w��)ˢ�p��늙C(j��)�\(y��n)���ڮ�����B(t��i)�r(sh��)���о����d�����d��ؓ(f��)�dͻ׃�N��r�µ�BDFM�D(zhu��n)�ٺ��D(zhu��n)�����ԡ���������BDFM�Ĺ����@�M�Ĺ��ʞ�1��5 kw�������@�M���ʞ�0��55 kw���@�M�ӷ�3Y��3Y���O��(sh��)��6��2��6�O�鹦���@�M��2�O�鹦���@�M��늙C(j��)����(sh��)��Rp=O��81����Lsp=80mH��Lpr=0.89 mH��Rc=1.81����Lsc=630 mH��Lcr=4��3 mH��Rr=1��57 m����L��=O��04 mH��J=O��02kg��m2�������@�M��ʩ������l�Դ��d��q�S���D(zhu��n)�Q������늉����_(d��)ʽ��
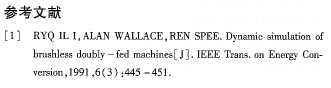
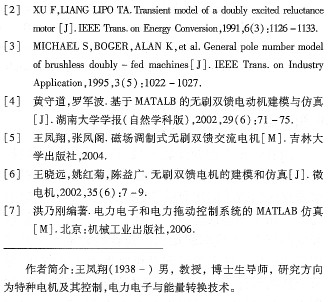
ʽ�У���=P p�� r���� r���D(zhu��n)���D(zhu��n)�^(gu��)��늚�Ƕȣ����զ� r  �鹦���@�M�ĘO��(du��)��(sh��)�� �D5���D6�քe��BDtl_M�ڿ��d�����d�\(y��n)�Еr(sh��)���D(zhu��n)�غ��D(zhu��n)�ٵķ��沨�Ρ��ĈD5�п��Կ�����BDFM�ڿ��d��(w��n)���\(y��n)�к��ஔ(d��ng)��һ�_(t��i)�O��(du��)��(sh��)��(P p+P c)��ͬ��늙C(j��)����ͬ���D(zhu��n)�ٞ�  ���s750 r��min���D(zhu��n)�ٷ�(w��n)���r(sh��)늴��D(zhu��n)�p�ٵ�0���ĈD6�п��Կ�����BDFM�ڎ��d(T1=5 N��m)��(w��n)���\(y��n)�к����D(zhu��n)�ٵ���750 r��min���D(zhu��n)�ٷ�(w��n)���r(sh��)늴��D(zhu��n)�ص���ؓ(f��)�d�D(zhu��n)�ء� �D7��BDFM��t=2 s�r(sh��)ؓ(f��)�dͻ�ӕr(sh��)���D(zhu��n)�غ��D(zhu��n)�ٵķ��沨�Ρ��ĈD7�п��Կ�����늙C(j��)��(w��n)���D(zhu��n)�ٽ�
4�Y(ji��)�Z(y��)
������BDFM��d��q�S�µĔ�(sh��)�W(xu��)ģ�͞���A(ch��)������MATALB��sIMuuNK�Ľ���ʽ���漯�ɭh(hu��n)��������BDFM��(d��ng)�B(t��i)����ģ�ͣ���Ɍ�(du��)BDFM�ڿ��d�����d��ؓ(f��)�dͻ׃�N�\(y��n)�Р�B(t��i)�µķ����о����f(shu��)���˱�����������BDFM��(sh��)�W(xu��)ģ�͵����_�ԺͿ����ԣ������ڻ\���D(zhu��n)�ӟo(w��)ˢ�p��늙C(j��)���N�\(y��n)�з�ʽ�Č�(sh��)�(y��n)�о���ͬ�r(sh��)Ҳ���������M(j��n)һ�����o(w��)ˢ�p��늙C(j��)�ĺ�(ji��n)���]�h(hu��n)���ơ�ֱ���D(zhu��n)�ؿ��Ƶ��о�����8�Oͬ���D(zhu��n)��(�D(zhu��n)��S��С)������(d��ng)���\(y��n)���^(gu��)���c��ͨ�Б�(y��ng)늙C(j��)���ƣ���(d��ng)t=2 s�r(sh��)ؓ(f��)�dͻ�ӕr(sh��)(T1=5N��m)��늙C(j��)��(j��ng)�^(gu��)�̕��^(gu��)�ɺ��������_(d��)����(w��n)����
�B(t��i)���D(zhu��n)�������@�Ľ��䣬�D(zhu��n)�ٷ�(w��n)���r(sh��)늴��D(zhu��n)�ص���ؓ(f��)�d�D(zhu��n)�ء�
�ɈD5���D7��֪��BDFM�ڮ����\(y��n)�Р�B(t��i)�µĿ��d�����d��ؓ(f��)�dͻ׃�N�\(y��n)�����Ե��D(zhu��n)�ٺ��D(zhu��n)��׃���^(gu��)���c��Փ�����ĽY(ji��)��һ�¡�
|