Ŀ���c��ۙ����DSP�\�ӿ��ƿ��еđ���
�T�꣬���Գ������ױ�
(�V�|���I��W���V�|�V��510006)
ժҪ����ֱ�����a�͈A�����a�������U����Ŀ���c��ۙ�����aԭ����ԓ���a�㷨�\�㺆�Σ����a���ȸߣ��܉�M�����ϵ�y���ٸ߾��ȵ�Ҫ�������ڌ��F���タ���p���������������ȏ��s�����IJ��a����ԓ���a�㷨������DSP�\�ӿ��ƿ��У�ͨ�^DSP�a���}�_���䣬�Ķ����F������ϵ�y�\���^�̜ʴ_�����ٵĿ��ơ�
�P�I�~��DSP���\�ӿ��ƿ���Ŀ���c��ۙ���a�㷨
�ЈD���̖��TM383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)06��0019��02
0����
TMS320LF2407��TMS320C2000ϵ��16λ���cDSPоƬ�����\�ӿ��ƿ��У�DSP������λ�C���\�ӿ���ָ�����ƅ�����ͨ�^λ�ÿ��ƺ��ٶȿ����㷨����Ӌ������}�_��̖���}�_����늙C���������F���M늄әC�Č��r���ơ�����һ�N�m��ԓ�\�ӿ����^�̵IJ��a�㷨����������\��Ч�ʣ��������DSP�Ŀ����ԣ����F�\�ӿ��ƿ����\���^�̵ĸ��ٸ߾��ȿ����Ƿdz���Ҫ�ġ�
1Ŀ���c��ۙ��ԭ��
1��1Ŀ���c��ۙ�����c
Ŀ���c��ۙ����������ʽ�����l����(SPG)������Ҫ���c���£�
(1)���aԭ�����Σ�ֻ�躆�εļӜp���\�㣻
(2)���a�����^�ߣ�ֱ�����a�`��С��һ���}�_�������A�����a�Y���rһ���]�ϣ��Ҳ��aֱ���͈A�������a���e���`�
(3)�M�o�ٶ������ƣ�(4)�܉��M��ֱ�����A�������タ���p�����ȶ�N�������a��
(5)�ܔUչ���N�ͺ������������������ȡ�
1��2Ŀ���c��ۙ��ԭ��
1��2.1ֱ�����a
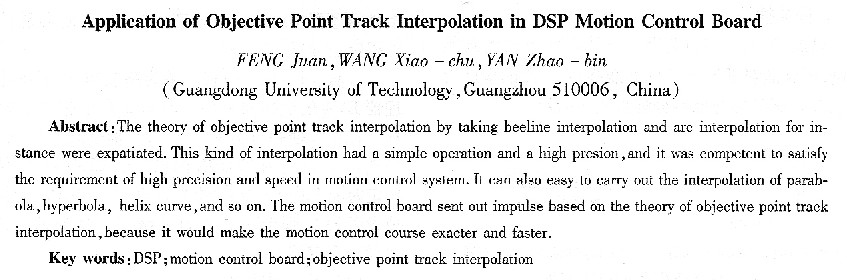
ֱ�����a���}�_������D1��ʾ���Oһֱ��OP�����c������ԭ�c0(0��0)���K�c��P(Xp��Yp)����OP���a�^������}�_�����ǣ�x�S����xp�����}�_��Y�S����Yp���}�_��x�S�����}�_�ĕr�g�g����a��Y�S�����}�_�ĕr�g�g����b���ҝM��aXp=6Yp��������}�_�ܶȸߵ��S����ʣ���ԓ�S�����M�o�}�_���g������Д�����������һ�S�}�_�Ƿ���ڣ����Д��Ƿ��M�o�����Ɍ��F�����}�_���䡣
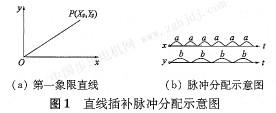
ֱ�����a�}�_����������D2��ʾ������F��ƫ���Єe����[1]��F=F��Xp+Yp������ʼ�c��ֱ���ϣ��tF=0����x=1��ʾ��x�S�M�oһ������x=0��ʾx�S���M�o��Y�Sͬ�����M�o�^����Xp��Yp���ֲ�׃�����OXp>Yp���ta<b����x�S�}�_�ܶȸߣ��t��x�S�}�_����ʣ���x�S�����M�o�}�_�g������ƫ���Єe����F������Д���������Y�S�}�_�Ƿ���ڣ�ֱ�����_�K�c�����a�Y����
���@�N�������Дֻ࣬�躆�εļӜp���\�㼴�Ɍ��Fֱ�����a����ʡ�˳����\�Еr�g������˴��aЧ�ʡ�
1��2.2�A�����a
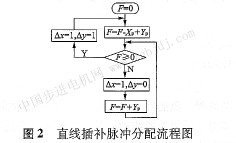
���cP(A����-B��)��A�ĵ�형rᘷ���ĈA��������P�c�LjA�����c0���о��K�c��P�c�����˞�(B����A��)���A�����a�}�_������D3��ʾ��
��0�c�_ʼ�M�ЈA�����a����0�c���\�ӷ����о�OP �ķ�����˰���0�c�_ʼ�ĈA�����a������0�c�_ʼ��0P�����ֱ�����a���棬��0�c����(�OС������)���v��Ч��һ�ӡ����ǣ���һ���Ժ���һ�c���о�������0P����횸�׃��һ�c���о������M��ֱ�����a��Ҳ�����f����ɈA�����a�����������о������ֱ�����a�팍�F������ÿ��һ����Ҫ�S�r��������λ�õ��A�ĵ�����ֵ��
�ĵ�ԭ�t�ǣ�ÿ����x�S����һ���}�_���͌�x�S�����}�_�ĕr�g�g��A���pl��ÿ����y�S����һ���}�_���͌�y�S�����}�_�ĕr�g�g��B����l���@�ͳ��˕r�̸�ۙ������λ�õ��A��P�c������ֵ��ÿ��Ӌ�㶼��x�S��y�S��ǰ���}�_�r�g�g���M�б��^�����}�_�ܶȸߵ��S������ʡ���D3��ʾ��A����V�����t��y�S�����(���A��<B�����t��x�S�����)��ÿ���\������S�M�oһ����Ȼ������\��Y����ͨ�^�A�����a��ƫ���Єe����[1]���Д�x�S�Ƿ�ͬ�rҪ�M�o����˷��ͣ����ɫ@�����cP��A�ĵĈA����
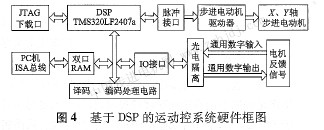
2�\�ӿ���ϵ�yӲ������
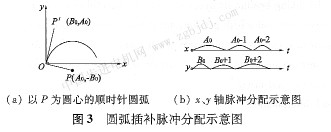
����DsP���\�ӿ���ϵ�y��Ӳ����D4��ʾ��
��λ�Cͨ�^�p��RAM���\�ӿ���ָ�����ƅ������f�o�\�ӿ��ƿ���DsP��DsP������λ�C��ָ�ͨ�^λ�ú��ٶȿ��Ƽ����a�㷨����Ӌ������}�_��̖���}�_����늙C������Ŀ���c��ۙ�����a����DsP�о��̌��F�ġ�
3Ŀ���c��ۙ����DsP�еđ���
������TM320LF2407���\�ӿ��ƿ��У��\���¼�������EVA��EVB�a���}�_���Ķ����FĿ���c��ۙ�����a��
��ֱ�����a�������Ox�S������S���\���¼�������EVA�Ķ��r��l�Ͷ��r��2�a���}�_���F���a����ֱ�����a�^���У�x�S�cy�S��ͬ���ģ����a������ͬ���ʿɌ�T2cON�ĵ�7λ12SWTl�O�Þ�l�����r��2��GP���r��l���ӣ���T2cON�ĵ�0λ�O�Þ�1���t���r��2�����ڼĴ����鶨�r��1�����ڼĴ�����
(1)ϵ�y��ʼ����ʼ���Д���־����̖�Uչλ������惦���g��
(2)DsP��ʼ��
(a)DSP�Дࣺ���SINT2��INT3�Д࣬��ʹ��EVA��EVB�ı��^�������r���Дࣻ
(b)ϵ�y�r犣�CLK0uT=4��CLKIN=40 MHz��
(c)ͨ��IO��IOPB���ֹ������Þ�����ܣ�
��ʹ��T1 PwM��T1 cMP��T2PwM��T2cMP�a��PwM���Σ��OT1PwM��T1cMP����x����T2PwM��T2cMP����y����
(3)�¼���������ʼ��
�O���¼�������EVA��ͨ�ö��r��l�����r��2���ƽ��Ч��������Ӌ��ģʽ��cPu�r�64���l���t�Ȳ��r犞�40 MHz��64=0��625 MHz����Ӌ���l����O��625 MHz��
(4)�{��Ŀ���c��ۙ��ֱ�����a����
(a)��ʼ��ƫ���Єe����������ʼ�c��ֱ���ϣ��ʳ�ʼƫ���O����F=O��
(b)�O��x�S�}�_����Xp����Xp�x�oһ��ȫ��׃��leflp��leffp��ʾ�����Sʣ���}�_����leffp=0�r�����a�Y�����O��y�S�}�_����Yp��Ӌ��ƫ���Єe����F=F-Xp+L��
(c)ע�������Д�̎�����������Д�̎������������D5��ʾ��
(5)ѭ�h�ȴ�
�ȴ���һ���Дࡣ
4�Y�Z
����DSP���¼��������a��������}�_����, �cĿ���c��ۙ����Y�ό��F���a�\�㣬ԭ�����Σ����a���ȸߣ���Ч��������DSIP�ĸ����\�������͌��r��̖̎��������ʹ�\�ӿ��ƿ��܉�M�����ϵ�y���ٸ߾��ȵ�Ҫ��
|