�oˢֱ��늄әC���ӷ����������
�����̣��־��
(�������I��W���������710072)
ժҪ����B��һ�N�m����ؓ�d��r�£�����DSP��������ͨ���l����ͬ���o�������oˢֱ��늄әC�����ӷ��������M���˷�����C���C��ԓ�����ڟoˢֱ��늄әC���d��r�£�늄әC���ӷ����Ϳɿ���ϵ�y�\���������á�
�P�I�~���oˢֱ��늄әC���o��������������ͨ���l�������ӣ�����
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2008)06��0016��03
0ǰ��
�o�������oˢֱ��늄әC������һֱ�ǹ����I����y�}��늄әC�D��λ����Ϣ�ī@ȡ�����ж�N����ͨ�^��늄ӄݫ@ȡ�D��λ����Ϣ��������еġ����ǟoˢֱ��늄әC�����ӕr����o���z�y��늄ӄݣ���ʹ늄әC��������ʧ�����@���B��DSP���Ƶ�������ͨ���l����ͬ�����ӷ��������^�õؽ�Q�@һ���}[1-2]��
1������ͨ���l����ͬ�����ӷ�
������ͨ���ڃ�����ͨ�ķ�ʽ������һ����ͨ�������늄әC�����ӕr��ݔ���D�ء�ͨ���oˢֱ��늄әC������120��늽Ƕȷ�ʽ���@�N��ʽ���ṩ��ݔ���D�����ޣ���늙C���d���^�d���ӕr�����ܕ���o���ṩ����ݔ���D�؎���ؓ�d��������늙C���ӕr�g�^�L������p�ġ����˽�Q�@һ���}�����Բ�������ͨ�ǵķ����팍�F����ͬ�r��ͨ���Ķ������D�ص�ݔ�����䌍�Fԭ�����£�
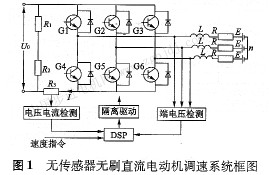
��D1��ʾ���������120��PWM��ʽ����ÿ��60��늽ǶȓQ��һ�Σ�ÿ�����ʹܵ�ͨ늽ǶȞ�120���������ʹܵČ�ͨ����GlG2��G2G3��G3G4,G4G5��G5G6��G6G1�������ʹ�cl��G2��ͨ�r�������G1����a���@�M���ٽ��^c���@�M��G2�����ص��Դ���������@�M����a�����D�؞������ɵúϳ��D�؞��3T0����������ʹܓQ����ͨ�r���ϳ��D�ش�С�Ԟ��3T0��ֻ�Ƿ����������D60��������ͨ���λ��ǰ��0����30��֮�g��ͨ늽ǶȔU��120����180��֮�g�r���oˢֱ��늄әC���D�غ�ݔ�����ʶ�����ߡ�
 �oˢֱ��늄әC��120��ͨ�ݔ���������r�£���������ݔ�����ɲ���ͨ���λ��ǰ30����ͨ늽Ƕ�120��+2��30��PWM��ʽ�������ʹ܌�ͨ����G1G2G3�� G2G3c4, G3G4G5, G4G5G6,GSG6G1��G6GIG2����0��ͨ���λ��ǰ30����ͨ늽ǶȔU��180�����༴GSG6GI��ͨ�r������քe���^G1��a���@�M��G5��c���@�M(��n��c���@�M���ٽ��^b���G6�������Դ���oˢֱ��늄әC�cֱ��늄әC���Ƶ�Ч���D�ط��̞�T=KT��I��������늘з������t�՞鳣���������a��c���@�M������a��c���@�M����քe��b���1/2������úϳ��D�ش�С��1��5Tc�����ca���60���A�ǡ���������ʹܓQ����ͨ�r���ϳ��D�ش�С�Ԟ�1��5T0�������������D60����120��+2 x30��PwM��ʽ�r���������b�������120��PWM��ʽ�r��4/3�����D�؞�120��PwM��ʽ�r��2��3/3�����oˢֱ��늄әC���@�M����늸ж���С���ʟoˢֱ��늄әC����120��PwM��ʽ�r��ݔ�����ʺ��D��Ҳ�����ӡ�
�o�������oˢֱ��늙Cͨ�^����ͨ�nj��F����ͬ�r��ͨ�������D��ݔ����ͬ�r����������l����ͬ�����ӷ�ʽ�����ӣ��˷���ͨ���oˢֱ��늄әC���ӕr���יz�y����늄ӄݵ�ȱ�c���o�������oˢֱ��늄әC�܉���D�����ӡ����l����ͬ�����ӵ�ԭ������DsP�����Ԏ����¼��������a��PwM���ο�����׃�����������üĴ�����œQ���r�g���_ʼ��늙C�ēQ���l�ʷdz�С��늙C�M��ͬ����B��Ȼ������_�h���Ƶķ�ʽ��늙C�ēQ���l����u�����@�Ӿ�ʹ늙C��ͬ����B���F��׃�l���ӡ��_ʼ�o�oˢֱ��늄әC�Ķ���һ����С��늉�ֵ��Ȼ���ı��^�Ĵ�����ֵ��ʹPWM���ε��}�_���Ȳ��������@�Ӽ��ڶ��Ӷ˵ĵ�Ч늉�����u���Ķ�Ҳ�͌��F��늙C���ӵ���u�������ȵ�늙C�����ϵ�늉�����r����늙C�D���_��һ���ٶȣ���ʹϵ�y�z�y����늄ӄݣ��˕r�Ϳ����m�r�،�늙C�ГQ����늄ӄݙz�y���Ƶ������]�h�\�Р�B�����늄әC�������^��[3-4]��
2���Wģ��
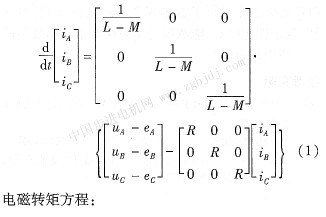
�ں����D��Ӱ푣��J�黥���dz������c�D��λ�ßo�P��r�£���늙C�����@�M�������B�������������Q�B�ӕr�ķ��̵ó�늙C������B���̣�
ʽ�У�B������ϵ����J��늙C���D�ӑT����T1��ؓ�d�D��[7]��
3����ģ�͵Ľ���
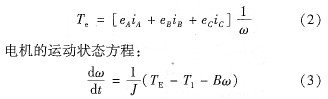
����ʽ(1)��ʽ(3)�����Է���ش���oˢֱ��늄әC����ϵ�y�ķ���ģ��[5-6]���D2����������ϵ�yģ�K�D��
3.1�oˢֱ��늄әCģ�K
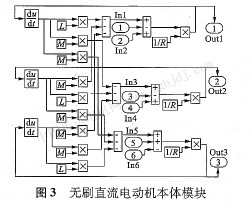
������B����ʽ������simulink�еĔ��W�\��ģ�K���Ծ�����������늙C����ģ�ͣ���D3��ʾ��
3.2�D���c�D��ģ�K
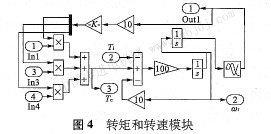
��늴��D�ط���ʽ�ɵ��D��ݔ���ķ���ģ�K����D4��ʾ������ݔ���ݔ�����������������������c�����ķ�늄ӄ�ϵ����ˣ���ͺ��õ��o
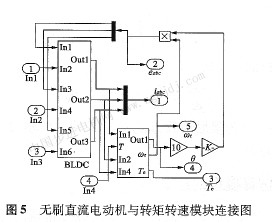
ˢֱ��늙C��늴��D�ء��D��ģ�K�t��늙C���\�Ӡ�B����ʽͨ�^simulink�еĔ��W�\��ģ�K�^�״����D4�Ұ벿����ʾ���D5��oˢֱ��늄әCģ�K�c�D���D��ģ�K�B�ӈD��
3��3��׃��ģ�K
��׃��ģ�K��1)SB�ṩ������MOsFET����
�_�P���������Է����m�����O�ܣ�����������׃���ӿ���ģ�K�����oˢ늄әC���\��ԭ����ͨ�^�D�����D�ĽǶȣ��ړQ���r���|�l���������Č�ͨ���P�࣬�a���������ݔ��[7-8]��
4����Y��
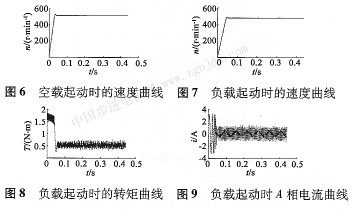
���挍�늙C�������£������@�M���R=4��765���������@�M�Ը�L=O��014 H������M=0��009 H���D�ӑT����=1��7 N��m���~��늉�u=300V���~���D��n=500r��min�����������ķ���ģ�Ͳ���������ͨ���l����ͬ�����ӷ������ڿ��d�ͼ���0��5 N��m�D��ؓ�d����r���M�Ќ��õ��IJ�����D6���D9��ʾ��
�Y�Z
ͨ�^���沨�ο��Կ�������������ͨ���l����ͬ�����ӷ����ӟoˢֱ��늄әC���܉��_���^���푑��ٶȺ��^����D��ݔ���������ӷ����ɿ���ϵ�y�\���������ã��dz��m�ώ��d��r�oˢֱ��늄әC�����ӡ���Ȼ���˽����_�P�p�ĺ��_�P����ͬ�r�ܸ��õر�����Fͬһ��ۃɂ����ʹ�ͬ�r��ͨ���l����·����r�����Ը���늙C�ľ��w����������ָ���M�Ќ��x������m��ֵ��һ��oˢֱ��늄әC�@��****�D�غ�ݔ�����ʕr��ͨ���λ****ֵ��15����20����ͨ늽Ƕ�****ֵ��150����160����
|